Осязание — это… Что такое Осязание?
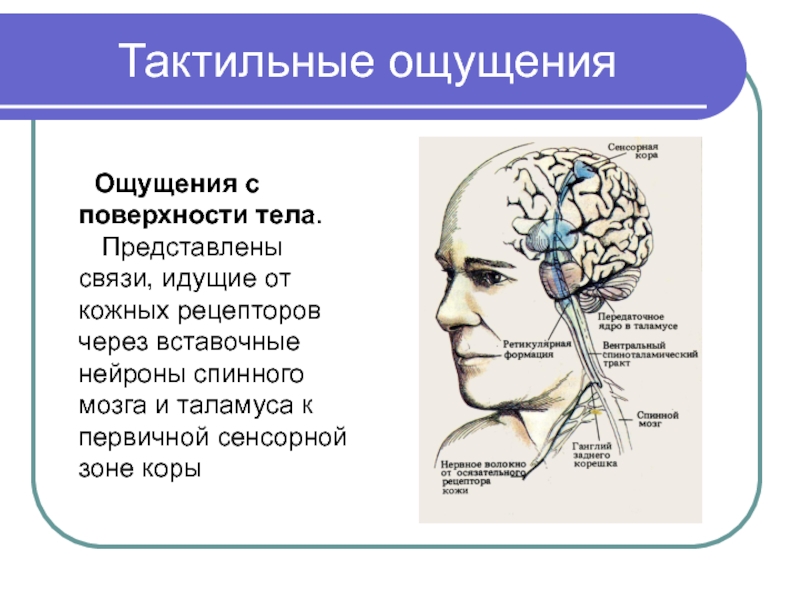
процесс комплексного восприятия организмом воздействия механических, температурных и других внешних факторов, осуществляемый с помощью рецепторов, расположенных в коже, мышцах, сухожилиях, суставах, а также слизистых оболочках языка, губ и др. Выделяют четыре вида основных осязательных ощущений: тактильные, тепловые, холодовые и болевые. Механорецепторы кожи обладают свойством реагировать на прикосновение, давление, растяжение и вибрацию, терморецепторы — на изменение температуры окружающей среды, поверхностные болевые рецепторы — на болевые раздражители (см. Боль). Осязание играет важную роль в процессе ориентации человека в пространстве, а также обеспечивает его информацией, необходимой для избегания вредных воздействий, способных вызывать повреждение покровов, болевые ощущения и т.п. В формировании О., связанного с движением частей тела или конечностей, принимают участие также рецепторы опорно-двигательного аппарата — проприорецепторы.


Осязание
Осязание — Одно из пяти основных видов чувств у человека, состоящее в способности ощущать физическое прикосновение к объектам, воспринимать что-либо рецепторами, расположенными в коже, мышцах, слизистых оболочках.
Осязание это сборное понятие. В принципе, можно было бы выделить не одно, а несколько самостоятельных видов ощущений, потому что они имеют разный характер:
— ощущения прикосновения,
— ощущения давления,
— ощущения вибрации,
— ощущения фактуры,
— ощущения протяженности.
Осязательные ощущения обеспечиваются работой рецепторов кожи двух видов:
— нервных окончаний, окружающих волосяные луковицы,
— капсул, состоящих из клеток соединительной ткани.
Для зрительного и слухового восприятия характерна полевая (объемная) особенность: мы воспринимаем окружающий нас кусок пространства целиком. То есть мы одновременно видим множество разных объектов перед собой, которые при этом могут находиться между собой в некоторых отношениях. Мы воспринимаем сразу все звуки вокруг нас, которые только может почувствовать наше ухо. Если произойдет перед нашими глазами яркая вспышка или какой-то объект издаст резкий звук, мы обратим на это свое внимание.
Осязание не имеет такого полевого характера. С помощью него мы получаем информацию лишь о тех объектах, с которыми находимся в физическом контакте. Исключение составляет, пожалуй, лишь ощущение вибрации — мы можем дистанционно почувствовать своей кожей сильные вибрации, возбуждаемые неким удаленным объектом.
Если некий объект, находящийся всего в нескольких сантиметрах от нас, вдруг резко изменит свою форму (например, у циркуля раздвинулись его ножки) или температуру (например, ложка нагрелась на пламени горелки), мы это даже не заметим, если будем использовать лишь средства осязания. Осязание, безусловно, нам дает для жизни очень много. Однако для познания объективной действительности, как отметил С. Л. Рубинштейн, осязание играет лишь подчиненную роль. Он же отметил, что реально для познания действительности существенно не пассивное прикосновение чего-то к коже человека, а активное осязание, ощупывание человеком окружающих его предметов, связанное с воздействием на них.
Осязание включает в себя ощущения прикосновения и давления в единстве с кинестетическими, мышечно-суставными ощущениями. Осязание это и экстеро- , и проприоцептивная чувствительность, взаимодействие и единство одной и другой. Проприоцептивные компоненты осязания идут от рецепторов, расположенных в мышцах, связках, суставных сумках (пачинниевы тельца, мышечные веретена). При движении эти рецепторы раздражаются изменением напряжением.
Человек имеет очень специфический орган осязания — руку. Рука даже в пассивном состоянии способна давать нам много осязательной информации, но, конечно же, главная познавательная ценность заключается именно в движущейся руке. Рука является и органом труда человека, и вместе с тем органом познания объективной действительности.
Рука отличается от других участков тела тем, что:
— чувствительность к прикосновению и давлению на ладони и кончиках пальцев в разы больше, чем на спине или плече,
— будучи органом, сформировавшимся в труде и приспособленным для воздействия на предметы объективной действительности, рука способна к активному осязанию, а не только к рецепции пассивного прикосновения,
— имеет обширную проекцию в коре головного мозга.
С. Л. Рубинштейн отмечает, что рука определяет следующие основные свойства материального тела, с которым соприкасается:
— твердость,
— упругость,
— непроницаемость.
Различие твердого и мягкого, например, производится по противодействию, которое встречает рука при соприкосновении с телом, отражающемуся в степени давления друг на друга суставных поверхностей. Осязательные ощущения (прикосновения, давления, совместно с мышечно-суставными, кинестетическими ощущениями), сочетаясь с многообразными данными кожной чувствительности, отражают и множество других свойств, посредством которых мы распознаем предметы окружающего нас мира:
— взаимодействие ощущений давления и температуры дает нам ощущения влажности,
— сочетание влажности с некоторой податливостью или проницаемостью позволяет нам распознавать жидкие тела в отличие от твердых,
— взаимодействие ощущений глубокого давления характерно для ощущения мягкого,
— во взаимодействии с термическим ощущением холода они порождают ощущение липкости,
— шероховатость и гладкость поверхности мы распознаем в результате вибраций, которые получаются при движении руки по поверхности, и различий в давлении на смежных участках кожи.
Рука с самого раннего детства, уже у младенца, является одним из важнейших органов познания окружающего. Младенец тянется своими ручонками ко всем предметам, привлекающим его внимание. Дошкольники и часто младшие школьники тоже при первом знакомстве с предметом хватают его руками, активно вертят, перемещают, поднимают его. Эти же моменты действенного ознакомления в процессе активного познания предмета имеют место и в экспериментальной ситуации.
С младенческого возраста осязание у человека функционирует в тесной связке со зрением и под его контролем. Когда человек, к сожалению, лишен зрения в результате слепоты, осязание тоже развивается, оно стремится компенсировать отсутствие зрения, но для восприятия пространства и отдельных объектов требуется значительно больше времени, часто картина остается неполной. Сложно, например, слепому познать форму дерева или размер дома. Однако при должном старании некоторые объекты слепыми и слепоглухими могут познаваться удивительно точно. Тому подтверждение — скульптуры работ незрячих мастеров.
Тому подтверждение — скульптуры работ незрячих мастеров.
В восприятии речи слепоглухонемых задействуется пальпация. «Слушание» речи слепоглухонемыми по способу «чтения с голоса» заключается в том, что слепоглухонемой прикладывает руку тыльной стороной кисти к шее говорящего в области голосового аппарата и путем тактильно-вибрационного восприятия улавливает речь.
У всех людей осязательные ощущения могут вызывать те или иные эмоции. Обычно эта связь носит условно-рефлекторный характер (то есть является результатом опыта). Интересно то, что люди довольно сильно различаются по степени «эмоциональности осязания». У многих людей осязательные ощущения вообще не вызывают каких-то заметных эмоций. Многие наоборот слишком «зациклены» на своих осязательных ощущениях.
Литература
Рубинштейн С. Л. Основы общей психологии. СПб., 1998.Epstein-Philosophy of the Body
ФИЛОСОФИЯ ТЕЛА: Хаптика. Эрос. Груминг. СПб. , Алетейя, 2006, http://www.moscowbooks.ru/book.asp?id=342495
, Алетейя, 2006, http://www.moscowbooks.ru/book.asp?id=342495
Михаил Эпштейн
Введение. Тело на перекрестке времен
ХАПТИКА
ТЕОРИЯ
Человек осязающий
Направления в хаптике
Этика осязания. Близость
Парадокс об осязании. Аристотель и Гегель
Oсязание себя в другом. Мерло-Понти и Бахтин
Эстетика и хаптика
ПРАКТИКА
Тактильное искусство
Манифесты
Экспонаты и комментарии
Книга и тело
Райский ком. Об осязательном идеале Воображение и воосязание
Словарь осязания и тактильного искусства
ЭРОС
Поэтика близости. Введение в эротологию
Наука страсти нежной. Эротология и сексология.
Секс и эрос. Хотеть и желать. Диалогичность желания
Эрос и вещи
Эрос остранения. Эротика и эстетика
Эротическое событие. Эротема
Эротема
Тело и плоть
Сладострастие и разврат
Секс — эрос — любовь
Химера и андрогин
Любовь и «печаль после соития»
Эрос цивилизации. Ирония желания и конец истории
Эрос и ирония Хитрость желания
Эрос и история. Эротосфера
Конец истории как предмет желания. Утопия и апокалипсис
Наслаждение и постмодерн
Плотское знание. Как философствуют телом
Плотское знание
Тело-сад
Любовь-кольцо. Предлог «в» и кружево тел
Тактильное поле. Волновая теория наслаждения
Поверхность и глубина
Близость и даль
Дрожь желания, мука наслаждения
Химия эроса.
Научное познание и плотский опыт
Русская философия и эротический язык
Желание длиною в мысль и в любовь
Приложение. Эротикон Ивана Соловьева
Предисловие
К теории соприкосновения
Прав ли Фрейд?
О двух революциях
Асексуальность в литературе и философии (Гоголь и Кант)
Пять родов любви
Эротика творчества
Ревность как вечный двигатель
Русская красавица
Немыслимость тела
Запястье
Еленология. Опыт построения новой науки
Опыт построения новой науки
ГРУМИНГ
Самоочищение. Гипотеза о происхождении культуры
От мухи до человека. Источники рефлексии
Груминг у животных и семиотика границы
Чистота и культура
Система культуросозидающих фильтров
Чистое и нечистое
ХАПТИКА
«В других чувствах человек уступает многим животным, а что касается
осязания, то он далеко превосходит их в тонкости этого чувства. Именно
поэтому человек самое разумное из всех живых существ.
Аристотель
Чем больше будут говорить при помощи кожи, одежды
чувства, тем больше будут приобретать мудрости.
Леонардо да Винчи
Самое глубокое в человеке — это его кожа.
Поль Валери
ТЕОРИЯ
Человек осязающий
Хаптика (haptics) — наука об осязании и прикосновении, о коже как органе восприятия и творчества, о тактильных формах деятельности и самовыражения. В широком и притом научно строгом смысле этого термина, осязание включает в себя все разнородные и многообразные ощущения, доставляемые прикосновением данного тела к наружным предметам или среде, включая кинестетические, температурные и болевые. [1] Следовательно, под хаптикой понимается такое взаимодействие человека с окружающим миром, которое может включать и напряжение мышечной ткани, если оно опосредуется наружно, кожей как органом осязания.[2]
В широком и притом научно строгом смысле этого термина, осязание включает в себя все разнородные и многообразные ощущения, доставляемые прикосновением данного тела к наружным предметам или среде, включая кинестетические, температурные и болевые. [1] Следовательно, под хаптикой понимается такое взаимодействие человека с окружающим миром, которое может включать и напряжение мышечной ткани, если оно опосредуется наружно, кожей как органом осязания.[2]
Слово «хаптика» (и соответствующее прилагательное «хаптический»), образовано от греческого слова haphe (осязание) и haptikos (осязательный, тактильный), которые в свою очередь образованы от haptesthai (трогать, хватать). Например, у Аристотеля можно прочитать: «Осязание же (haphe) получается от непосредственного соприкосновения (haptesthai) с предметами, поэтому оно и носит это название. Хотя и остальные органы чувств воспринимают путем соприкосновения, но через иное [«т.е. через среду», как Аристотель поясняет выше. — М. Э.] . По-видимому, только осязание воспринимает непосредственно (di’hautes)».[3]
— М. Э.] . По-видимому, только осязание воспринимает непосредственно (di’hautes)».[3]
Созвучие с грубоватым глаголом «хапать» усиливает шанс этого ученого термина на вхождение в русский язык. К тому же есть основания предполагать этимологическую связь греческого haphe и русского «хапать»: последнее имеет аналогию не только в ряде славянских языков (чешское chapati, хватать, польское chapac, хватать), но и в романо-германских. Макс Фасмер толкует «хапать» как возможное продолжение индоевропейского «khap», родственное латинскому «capio, capere», брать, верхненемецкому happig, жадный, нижненемецкому happen, жадно хватать.[4] К этому можно добавить английское capture, схватить, поймать, взять в плен. Именно по причине прозрачности этого корня в русском языке мы выбираем термин «хаптика», предпочитая его более употребительному в переводной психологической литературе термину «гаптика».
Роль осязания исключительно важна в формировании как животных, так и человеческих особей. Приведем ряд примеров. В 1950 г. Хэрри Харлоу (Harry F. Harlow) сообщил результаты исследований с детенышами резусов (разновидность макак), которые воспитывались с поддельными матерями, чучелами из проволоки. Детеныши не привязывались к тем «матерям», от которых получали молоко, но привязывались к тем, которые были покрыты махровой тканью и были приятны и уютны наощупь. Осязание оказалось более важным фактором привязанности, чем питание.[5]
Приведем ряд примеров. В 1950 г. Хэрри Харлоу (Harry F. Harlow) сообщил результаты исследований с детенышами резусов (разновидность макак), которые воспитывались с поддельными матерями, чучелами из проволоки. Детеныши не привязывались к тем «матерям», от которых получали молоко, но привязывались к тем, которые были покрыты махровой тканью и были приятны и уютны наощупь. Осязание оказалось более важным фактором привязанности, чем питание.[5]
Лишенные прикосновений, младенцы умирают. В США еще во втором десятилетии нашего века почти сто процентов подкидышей в возрасте до одного года умирали в домах призрения. Доктор Фритз Талбот (Бостон) в 1940 г. привез метод ласкового обращения с подкидышами из одного детского дома в Германии. Если все необходимые медицинские меры были приняты, а младенец тем не менее чах и угасал, его поручали женщине плотного сложения, которая все время его носила. После этого показатель смертности младенцев в американских детских домах резко понизился. [6]
[6]
Традиционно считается, что тактильность относится к самым примитивным формам коммуникации. «Ее семиотическая значимость понижается при переходе от зоосемиотике к антропосемиотике. Передача информации посредством осязания становится все менее существенной в ходе человеческого развития — онто- и филогенеза. В культуре прикосновение не только имеет ограниченный коммуникативный потенциал, но также и репрессируется нормами разных обществ».[7]
K наименее контактным относятся обычно культуры Северной Европы и Северной Америки, а также Дальнего Востока.[8] Общество, где люди утратили осязательное отношение друг к другу, где в почете дистанция и правят зрение и слух, подвержено опасности дегуманизации. В этом контексте Хосе Ортега-и-Гассет заключает: «…Было бы серьезной ошибкой предположить, что зрение является главным «чувством». Даже с позиции психофизиологии, которая имеет подчиненный характер, день ото дня становится яснее, что первичным чувством было осязание и что от него впоследствии отпочковались все прочие. С нашей, еще более радикальной точки зрения очевидно, что осязание — основная форма нашего общения с вещным миром. И если это так, то осязание и соприкосновение являются решающими факторами, определяющими строение нашего мира».[9]
С нашей, еще более радикальной точки зрения очевидно, что осязание — основная форма нашего общения с вещным миром. И если это так, то осязание и соприкосновение являются решающими факторами, определяющими строение нашего мира».[9]
Показательно, что именно в тех обществах, где осязательные контакты репрессируются особенно жестко, как «неприличные», нарушающие privacy, там же заостряется и потребность в расширении таких контактов, вплоть до возведения их в новый общественный ритуал. «Коснитесь кого-нибудь сегодня!» — с таким воззванием обращается к Англии и миру Институт социальных изобретений (Лондон).[10] Организаторы «трогательного» месячника предлагают каждому англичанину коснуться трех мужчин и трех женщин и предложить им в свою очередь прикоснуться к шестерым. Проект подразумевает не сексуальные, а социальные касания, например, дружеское похлопывание по плечу. Предполагается, что если все последуют призыву, общая касаемость вырастет в геометрической прогрессии и в итоге проект, в буквальном смысле, коснется всех жителей Британии. Впервые идея месячника появилась в 1982 г. у группы студентов, подсчитавших, что в парижском кафе посетители прикасались друг к другу в среднем 110 раз в час, в то время как в лондонском — ни разу. Отрадно, что за время первого месячника (ноябрь 1982) количество людей, соприкоснувшихся в Британии, выросло на 2 миллиона.
Впервые идея месячника появилась в 1982 г. у группы студентов, подсчитавших, что в парижском кафе посетители прикасались друг к другу в среднем 110 раз в час, в то время как в лондонском — ни разу. Отрадно, что за время первого месячника (ноябрь 1982) количество людей, соприкоснувшихся в Британии, выросло на 2 миллиона.
Сколь ни поверхностной кажется идея подобного светского обряда, у нее очень глубокие ритуальные корни. Изревле прикосновение составляло чувственную основу магии и самых священных символических действий — клятвы, присяги. Отсюда корневое родство слов «осязание» и «присяга»: оба происходят от праславянского «сягати» (касаться, доставать). Присяга, собственно, и означала прикосновение к предмету клятвы — земле, крови, телу, знамени, и т.д. Да и сегодня глава государства, вступая в должность, приносит присягу, кладя руку на текст Священного Писания или Конституции. Прикосновением к Писанию или Закону освящается и сам акт создания нового государства, провозглашения новой нации.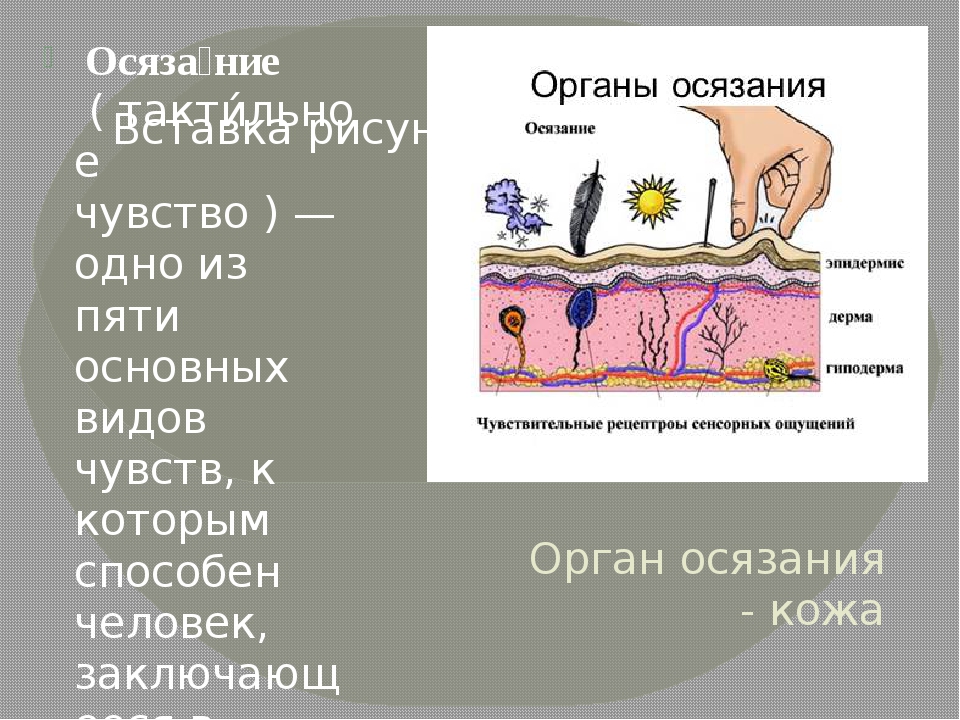 [11]
[11]
Судьба осязания в культуре Нового времени парадоксально связана с изменением понятий «такта» и «тактичности». В современном обиходе это умение соблюдать дистанцию, не навязывать другому человеку своих мнений или эмоций, искусство обходительного обращения с людьми, т.е. обхождения их на расстоянии. Тактично — не сталкиваться впрямую, не теснить, не задевать. Между тем слово «такт» в европейских языках происходит от латинского «tactus» — «прикосновение, чувство осязания» (отглагольное существительное от «tangere» — «трогать, касаться»). Отсюда в тех же языках развилось и понятие «тактильности», осязательности. Что общего между «тактичностью» и «тактильностью» — словами, происходящими от одного латинского корня? Казалось бы, ничего. Но в том-то и дело, что тактичность изначально предполагает чувствительность, а значит, способность почувствовать другого посредством максимального сближения, прикосновения. И лишь постепенно «тактичность» в современном смысле (который в английском языке прослеживается с начала 19-го века) отделилась от тактильности и противопоставила ей себя, как чувство дистанции, умение обходить другого, не задевая его. Чувствительность проявляется уже не в том, чтобы прикасаться к ближнему, а в том, чтобы избегать таких прикосновений. И лишь в любовных или дружеских отношениях тактичность и тактильность заново сближаются, как, например, в письме американского писателя Генри Джеймса его близкому другу журналисту Мортону Фуллеру: «Вы красивы, вы более чем тактичны, — вы нежны, волшебно тактильны…»[12]
Чувствительность проявляется уже не в том, чтобы прикасаться к ближнему, а в том, чтобы избегать таких прикосновений. И лишь в любовных или дружеских отношениях тактичность и тактильность заново сближаются, как, например, в письме американского писателя Генри Джеймса его близкому другу журналисту Мортону Фуллеру: «Вы красивы, вы более чем тактичны, — вы нежны, волшебно тактильны…»[12]
Как видим, чувство осязания, или тактильности, сопровождает движение культуры и языка в такие удаленные области, как ритуал присяги и светский такт. Наконец, чувство осязания более всех остальных отвечает за наше представление о реальности в противоположность иллюзии, подделке, галлюцинации. «Неужели я не во сне? Неужели это не греза? Ущипните меня!» — такова вопросительно-восклицательная фразеология приведения себя в чувство, под каковым понимается прежде всего осязание — «щипок». Tango ergo sum. Oсязаю, следовательно, существую. Мыслить ( cogitare ) можно и во сне, и в видениях, а вот щипок — это уже несомненная явь, начало пробуждения.
Мыслить ( cogitare ) можно и во сне, и в видениях, а вот щипок — это уже несомненная явь, начало пробуждения.
То, что осязание, как правило, ставится на последнее место в перечне органов чувств (после зрения, слуха, обоняния, вкуса[13] ), с одной стороны, несправедливо, с другой, подтверждает именно то, что осязание является самым обиходным и привычным из всех чувств, поэтому менее всего выделяется, артикулируется. Мы можем закрыть глаза, уши, заткнуть нос, не брать ничего в рот, но мы не можем содрать с себя кожу. Бодрствуя, мы не можем не осязать. Мы постоянно осязаем свою одежду, а, раздевшись, осязаем поверхность, на которой стоим или лежим. В терминах чувств, anthropos haptikos — наиболее правильное и тривиальное определение человека. Именно в силу привычности осязания мы более всего пренебрегаем им, когда речь заходит о теории чувств, о сознательной, творческой разработке всей палитры человеческой чувственности. Само слово «теория» образовано от греческого thea — «взгляд, видение». Так что зрение по традиции пользуется преимуществом в деятельности ума. Тем более важно вывести осязание из этого интеллектуального подполья, из режима автоматизма, который обрекает на забвение именно то, что наиболее существенно и привычно для нас. В разработке нуждается теория осязания — как ни странно звучит для нас в этимологическом плане этот оксюморон.
Так что зрение по традиции пользуется преимуществом в деятельности ума. Тем более важно вывести осязание из этого интеллектуального подполья, из режима автоматизма, который обрекает на забвение именно то, что наиболее существенно и привычно для нас. В разработке нуждается теория осязания — как ни странно звучит для нас в этимологическом плане этот оксюморон.
Направления в хаптике
В хаптике как научной и прикладной дисциплине можно выделить несколько направлений: психологическое, техническое, философское и художественное.
Первое — самое раннее по времени возникновения: еще в начале 20-го века стали появляться экспериментальные исследования по психологии восприятия, в том числе тактильного. Классической считается книга Дэвида Каца «Мир касания» (1925). Но еще раньше появился учебник Эдварда Титченера по психологии (1910), где уделяется внимание осязательным перцепциям. Современная классика — книга Эшли Монтагю «Прикосновение. Человеческий смысл кожи» (1986), где прослеживается значимость осязания, в частности, тактильных контактов ребенка с родителями, для формирования личности.[14] Психологическое направление в хаптике граничит, с одной стороны, с педагогикой, теорией воспитания, с другой стороны, с гуманистической психотерапией и холистской медициной («целостным целительством»).
Человеческий смысл кожи» (1986), где прослеживается значимость осязания, в частности, тактильных контактов ребенка с родителями, для формирования личности.[14] Психологическое направление в хаптике граничит, с одной стороны, с педагогикой, теорией воспитания, с другой стороны, с гуманистической психотерапией и холистской медициной («целостным целительством»).
В последние двадцать лет хаптика стала популярна в исследованиях, посвященных проблемам искусственного интеллекта и виртуальной реальности. Чувство осязания оказывается важнейшим и сложнейшим для воссоздания виртуальной среды, которая должна создавать полную иллюзию реальности и комплексно воздействовать на все органы чувств. Да и искусственный разум оказывается не слишком разумным, если он отключен от тех тактильных перцепций и операторов, которые лежат в основе концептуальных систем: твердое — мягкое, тяжелое — легкое, холодное — горячее, гладкое — шершавое… Только так, «наощупь,» воспринимаются важнейшие параметры окружающего мира. Причем в работе над компьютерными симуляциями хаптика часто соединяется с кинестезией — или включает ее в себя.
Причем в работе над компьютерными симуляциями хаптика часто соединяется с кинестезией — или включает ее в себя.
С 1990 г. при Массачусеттском Институте Технологии работает Лаборатория Человеческой и Машинной Хаптики (Тhe Laboratory for Human and Machine Haptics), более известная как Лаборатория Осязания. Ее цель — изучение человеческих и построение машинных хаптик, а также развитие виртуальных и телеоперационных систем ваимодействия людей и машин. Сюда входят такие разделы, как биомеханика кожи, нейрофизиология, психофизика, моторно-информационный контроль, манипуляционные стратегии и их компьютерные модели… С 1999 г. издается электронный журнал по хаптике (HAPTICS. The Electronic Journal of Haptics Research), где печатаются весьма специальные работы, такие как «Силовой контроль хаптической симуляции виртуального окружения по способу закрытой петли».[15]
Что касается практических симуляций «сязи» (осязательной яви), в настоящее время даже самая передовая компьютерная техника находится примерно на полпути к хаптизации пространственных объектов, т. е. их осязательной виртуализации. Уже сейчас легко представить себе, что разница между большими и маленькими файлами или между графикой и текстом на компютере будет ощущаться на вес и наощупь благодаря тактильному устройству, вмонтированному в мышь. Компьютерщики называют эти виртуально осязаемые массивы «цифровой глиной» (digital clay). В 2001 г. вышла на рынок система FreeForm, которая в трехмерном пространстве компьютерной графики имитирует глину или пластилин, позволяет моделировать обувь, игрушки, классические скульптуры. Ведется работа над аппаратурой, которая позволит достоверно чувствовать ткань — вплоть до ворсинок и направления волокон. По прогнозам, в ближайшие шесть-семь лет покупатели смогут пощупать кусок шелка, шерсти или другого материала, просто проведя пальцем по экрану компьютера, — это снимет важное ограничение для многих потенциальных покупателей интернет-магазинов. Огромны возможности компьютерной хаптике в медицине, в частности, в медицинском образовании. Например, практикант-медик, который вводит имитатор эндоскопа в глотку пациента, ощущает сопротивление, упираясь в виртуальную опухоль или стенку артерии.
е. их осязательной виртуализации. Уже сейчас легко представить себе, что разница между большими и маленькими файлами или между графикой и текстом на компютере будет ощущаться на вес и наощупь благодаря тактильному устройству, вмонтированному в мышь. Компьютерщики называют эти виртуально осязаемые массивы «цифровой глиной» (digital clay). В 2001 г. вышла на рынок система FreeForm, которая в трехмерном пространстве компьютерной графики имитирует глину или пластилин, позволяет моделировать обувь, игрушки, классические скульптуры. Ведется работа над аппаратурой, которая позволит достоверно чувствовать ткань — вплоть до ворсинок и направления волокон. По прогнозам, в ближайшие шесть-семь лет покупатели смогут пощупать кусок шелка, шерсти или другого материала, просто проведя пальцем по экрану компьютера, — это снимет важное ограничение для многих потенциальных покупателей интернет-магазинов. Огромны возможности компьютерной хаптике в медицине, в частности, в медицинском образовании. Например, практикант-медик, который вводит имитатор эндоскопа в глотку пациента, ощущает сопротивление, упираясь в виртуальную опухоль или стенку артерии. Наконец, резко расширится область повседневных личных отношений, опосредуемых паутиной. К эмейлу, посланному возлюбленной, можно будет прикрепить поцелуй, а другу — рукопожатие. По мысли физика Сидни Перковица, автора статьи о современном состоянии хаптики, «с компьютером незачем обниматься, но прикосновение к нему может оказаться неожиданно полезным».[16]
Наконец, резко расширится область повседневных личных отношений, опосредуемых паутиной. К эмейлу, посланному возлюбленной, можно будет прикрепить поцелуй, а другу — рукопожатие. По мысли физика Сидни Перковица, автора статьи о современном состоянии хаптики, «с компьютером незачем обниматься, но прикосновение к нему может оказаться неожиданно полезным».[16]
Третье направление в хаптике связано с философией, этикой и теоретической эстетикой осязания. В последние десятилетия, в связи с новым осознанием телесности как метафизического ограничителя сознания и форматора бессознательных и когнитивных структур, возрастает интерес и к осязанию. Однако кроме M. Мерло-Понти и Г. Башляра, Р. Барта и Ж. Делеза, уделяющих скромное место осязанию в своих феноменологических и/или семиотических анализах телесности и чувственного восприятия, в области философской хаптики трудно назвать какие-то специфические достижения и прорывы.
Именно философским аспектам хаптики, в частности, ее этическим и эстетическим составляющим, посвящается первая, теоретическая часть этого раздела. О творчески-художественном направлении в хаптике, об опытах создания нового, тактильного вида искусства (touch art) будет говориться во второй части — «Практика».
О творчески-художественном направлении в хаптике, об опытах создания нового, тактильного вида искусства (touch art) будет говориться во второй части — «Практика».
Этика осязания. Близость
В иерархии пяти чувств осязание обычно ставится на последнее место, как самое грубое и низменное, тогда как высшие места отводятся зрению и слуху. В известных рассуждениях Аристотеля из «Никомаховой этики» именно осязание, в гораздо больше степени, чем другие два «низших» чувства, обоняние и вкус, чревато моральными извращениями.
«Благоразумие и распущенность связаны с такими удовольствиями, которые общи людям и остальным животным, а потому представляются низменными и скотскими. Это осязание и вкус. Но ко вкусу человек, кажется, прибегает мало… отнюдь не это доставляет наслаждение, по крайней мере распущенным, но смакование — а оно возникает всегда благодаря осязанию — как при еде, так и при питье и при так называемых любовных утехах. /…/Итак, распущенность проявляется в связи с тем чувством, которое, более чем все другие, является общим /всем живым существам/, и ее с полным правом можно считать достойной порицания, потому что она присутствует в нас не постольку, поскольку мы люди, а постольку, поскольку мы животные. Наслаждаться такими чувствами, т.е. иметь к ним исключительное пристрастие, — /значит жить/ по-скотски.»[17]
/…/Итак, распущенность проявляется в связи с тем чувством, которое, более чем все другие, является общим /всем живым существам/, и ее с полным правом можно считать достойной порицания, потому что она присутствует в нас не постольку, поскольку мы люди, а постольку, поскольку мы животные. Наслаждаться такими чувствами, т.е. иметь к ним исключительное пристрастие, — /значит жить/ по-скотски.»[17]
Иерархизм в толковании чувств — одно из проявлений метафизического крена европейской цивилизации, ее семиоцентризма. Предпочтение отдается тем чувствам, которые предполагают удаленность субъекта от объекта восприятия и возможность или необходимость их знакового опосредования. Все знаковые системы, в рамках которых развивалось западное представление о разумности и духовности, — и прежде всего речь, язык, — связаны исключительно со зрительным и слуховым восприятием (только в случае поражения этих органов чувств, как их несовершенная замена, используется осязание). В силу отчужденности органов зрения и слуха от объектов восприятия между ними возникает поле замещение и отсылки, в котором и возникают знаки — видимые частицы или звуковые волны материи, которые служат для представления отсутствующих, «идеальных» объектов — идей, понятий, значений. Именно посредством зрения и слуха и развивается сфера идеального, которая провозглашает свою иерархию чувств, — в ней зрение и слух размещаются, естественно, на верхних ступенях, как самые верные слуги идеального и его посредники в связях с материальным миром.
Именно посредством зрения и слуха и развивается сфера идеального, которая провозглашает свою иерархию чувств, — в ней зрение и слух размещаются, естественно, на верхних ступенях, как самые верные слуги идеального и его посредники в связях с материальным миром.
Обоняние — также чувство дистанционное — воспринимает свой предмет через распространение его частиц по воздуху и этим отчасти сходно со слухом. Осязание же, непосредственно представляющее свой предмет через касание, есть самое контактное из чувств — наряду со вкусом. Но вкус имеет гораздо более узкую область применения, поскольку его рецепторы расположены только на поверхности языка, а его объектами могут служить только растворимые вещества. Не следует забывать, что язык — это также наиболее чувствительный орган осязания, и именно с осязательной, а не только вкусовой способностью связано удовольствие, получаемое от еды и питья, — ощущения плотности, текучести, упругости, теплоты и прохлады и т.д. Осязание непосредственно подводит вещь к органу ее восприятия, к границам тела, рецепторам кожи. Поэтому весь семиократический дискурс пренебрегает осязанием, обвиняет его в моральной неполноценности, животной низости.
Поэтому весь семиократический дискурс пренебрегает осязанием, обвиняет его в моральной неполноценности, животной низости.
В какой мере справедливы нападки Аристотеля на распущенность, гнездящуюся в осязании? У чувства осязания есть особая этика, которая может подвергнуть собственному суду те критерии, которые, начиная с греческих философов, наделяют зрение и слух высочайшим этическим достоинством. Между ощущениями трогающего и трогаемого — наименьшая разница, если сравнить с таким же разделением активных и пассивных состояний в других органах чувств. Между речью и слухом, между показыванием и зрением, между испусканием и вдыханием запаха или приготовлением и вкушением пищи — огромная разница в самих способах воздействия и восприятия. Между тем в области осязания между воздействием и восприятием почти нет различия в качестве ощущений. Одним и тем же прикосновением мы осязаем сами и делаемся осязаемыми для других.
Так же обстоит дело и с осязанием самого себя. По наблюдению одного из основоположников хаптологии Дэвида Каца,
По наблюдению одного из основоположников хаптологии Дэвида Каца,
«Взаимное восприятие двух частей тела, имеющих одни и те же органы ощущения, уникально; нет ничего подобного за пределом ощущений кожи. /…/Во время прикосновения к собственному телу обычно преобладает ощущение от той части тела, которая выступает как объект, а не субъект прикосновения, например, если мы пальцем касаемся своего языка. Но если мы пальцем одной руки касаемся того же пальца на другой руке, или если взаимно трогают друг друга пальцы на одной руке, то практически невозможно различить два ощущения, возникающие в одном прикосновении.»[18]
Вот эта взаимообратимость осущений осязающего и осязаемого в акте соприкосновения и составляет психофизическую основу тактильной этики. Эта этика не нововыдуманная, а совпадающая с древней библейской традицией, согласно которой именно зрение есть источник «распущенности», источник первородного греха. Положительная заповедь, данная человеку, — это «плодитесь и размножайтесь» и, как необходимое условие этого, — да «прилепится человек к жене своей, и будут два одна плоть». Соблазн же происходит не через «прилепление плоти», но через зрение — «и увидела жена, что дерево /познания добра и зла/ хорошо для пищи, и что оно приятно для глаз и вожделенно» (Бытие, 3:6). Более того, зрение, в каком-то таинственном смысле, есть не только причина, но и последствие грехопадения: «и открылись глаза у них обоих, и узнали они, что наги» (3:7). Не плотское знание, как сближение жены с мужем, есть грех, но зрение (созерцание, подсматривание, соглядатайство) как разрыв плотского знания, удаление себя от другого, раскол древа жизни на отношение субъекта и объекта, добра и зла. Зрение лежит в основе такой двойственности, поскольку оно четко разделяет видящего и видимое.
Соблазн же происходит не через «прилепление плоти», но через зрение — «и увидела жена, что дерево /познания добра и зла/ хорошо для пищи, и что оно приятно для глаз и вожделенно» (Бытие, 3:6). Более того, зрение, в каком-то таинственном смысле, есть не только причина, но и последствие грехопадения: «и открылись глаза у них обоих, и узнали они, что наги» (3:7). Не плотское знание, как сближение жены с мужем, есть грех, но зрение (созерцание, подсматривание, соглядатайство) как разрыв плотского знания, удаление себя от другого, раскол древа жизни на отношение субъекта и объекта, добра и зла. Зрение лежит в основе такой двойственности, поскольку оно четко разделяет видящего и видимое.
Значит, если за этический критерий брать не отстраненность разума от сущего, не «благоразумие» и «воздержание», не созерцание чистых идей, отвлеченных от болящей и тлеющей плоти, как у античных философов, — но слепленность с чужой плотью и любовь к ближнему как к самому себе, то осязание, как способность ощутить и пережить меру близости, получает этическую санкцию. Орган осязания дарит нам острое переживание любви, дружбы, семейственности, отцовства и материнства, братства и сестринства, соседства, округи, тесноты, сплоченности всех живущих существ. «Сплоченность», собственно, и есть единение плотью. Не случайны эти выражения: «чувство локтя,» «бок о бок» — нужно иметь возможность потрогать другого, чтобы ощутить его рядом. В осязании есть та достоверность присутствия, теплота совместности, которую нельзя воспринять никаким другим органом чувств.
Орган осязания дарит нам острое переживание любви, дружбы, семейственности, отцовства и материнства, братства и сестринства, соседства, округи, тесноты, сплоченности всех живущих существ. «Сплоченность», собственно, и есть единение плотью. Не случайны эти выражения: «чувство локтя,» «бок о бок» — нужно иметь возможность потрогать другого, чтобы ощутить его рядом. В осязании есть та достоверность присутствия, теплота совместности, которую нельзя воспринять никаким другим органом чувств.
Tот факт, что западная цивилизация, вслед за античностью, строилась на метафизике зрения и слуха, в открытом поле которых множились знаковые системы, опосредующие восприятие и реальность, — заставляет более радикально подойти к возможности построения иной философии, этики, ценностных систем на основе осязания. Сама удаленность созерцаемого или слышимого объекта создает возможность его психологической эксплуатации, своего рода перцептивного насилия. Он попадает в зону отчуждающего пользования — подсматривания, подслушивания, неведомого для него наблюдения. Не существует аналогичного понятия «подосязания«, посколькуосязать что-либо можно лишь будучи самому осязаемым, прикасаться — только в ответ на такое же прикосновение. Касание есть всегда акт встречный, это пребывание на той границе, которая разделяет и одновременно соединяет двоих и которая в силу своей граничности не может принадлежать только одному. Чтобы воссоздать аналогичную ситуацию в мире зрения, нужно предположить, что двое смотрят прямо в глаза друг другу. Углубляясь в глаза другого, я позволяю глубже проникнуть ему в свои глаза, зрение само становится зримым. То, что в мире зрения происходит время от времени, от случая к случаю, в мире осязания является правилом: осязающее является осязаемым. Здесь не может быть ситуации одностороннего разглядывания, приникания глаза к щелке, открытости и уязвимости одного при полной невидимости и защищенности другого. Даже касаясь неодушевленного предмета, я ощущаю себя касаемым. Согласно Э. Гуссерлю,
Не существует аналогичного понятия «подосязания«, посколькуосязать что-либо можно лишь будучи самому осязаемым, прикасаться — только в ответ на такое же прикосновение. Касание есть всегда акт встречный, это пребывание на той границе, которая разделяет и одновременно соединяет двоих и которая в силу своей граничности не может принадлежать только одному. Чтобы воссоздать аналогичную ситуацию в мире зрения, нужно предположить, что двое смотрят прямо в глаза друг другу. Углубляясь в глаза другого, я позволяю глубже проникнуть ему в свои глаза, зрение само становится зримым. То, что в мире зрения происходит время от времени, от случая к случаю, в мире осязания является правилом: осязающее является осязаемым. Здесь не может быть ситуации одностороннего разглядывания, приникания глаза к щелке, открытости и уязвимости одного при полной невидимости и защищенности другого. Даже касаясь неодушевленного предмета, я ощущаю себя касаемым. Согласно Э. Гуссерлю,
«. ..Мы не можем также видимую вещь видеть как постоянно трогающую видящий глаз, прикасающуюся к нему, в отличие от того, что мы можем проделать с действительно осязающим органом — взять, к примеру, /ситуацию/ ладони, касающейся предмета, или предмета, касающегося ладони. … То, что я называю видимым телом, не есть видимое видящее, подобно тому, как мое тело в качестве осязаемого тела является осязаемым осязающим».[19]
..Мы не можем также видимую вещь видеть как постоянно трогающую видящий глаз, прикасающуюся к нему, в отличие от того, что мы можем проделать с действительно осязающим органом — взять, к примеру, /ситуацию/ ладони, касающейся предмета, или предмета, касающегося ладони. … То, что я называю видимым телом, не есть видимое видящее, подобно тому, как мое тело в качестве осязаемого тела является осязаемым осязающим».[19]
Именно эта двусторонность осязания и создает возможность наслаждения, т.е. такого отношения двух тел, когда оно взаимно конститутируют свою телесность из касания друг друга, тогда как зрение, которое само не конститутируется актом видения, лишь создает односторонний объект желания.
Если зрение и слух построены на отчуждении субъекта и объекта и лишь особым диалогическим усилием могут преодолевать эту односторонность, то в осязание встречность/взаимность встроена изначально. По-видимому, само существование знаков связано с односторонностью зрения и слуха, их отчужденностью от объекта и возможностью заменять объект его условным подобием, указателем, символом. Но осязанием воспринимается именно данность того, что осязается. Нельзя создавать знакового замещения мокрому или горячему, если оно само не является мокрым или горячим. Именно потому, что касаясь, я сам становлюсь касаемым, я не могу опосредовать это отношение касания через знак, означаемое которого по определению отсутствует, поскольку замещается чем-то другим.
Но осязанием воспринимается именно данность того, что осязается. Нельзя создавать знакового замещения мокрому или горячему, если оно само не является мокрым или горячим. Именно потому, что касаясь, я сам становлюсь касаемым, я не могу опосредовать это отношение касания через знак, означаемое которого по определению отсутствует, поскольку замещается чем-то другим.
Эта принципиальная неопосредованность осязания знаками, непредставимость-незамещаемость в образах и подобиях, способна создавать уникальное отношение близости, в том смысле, как еe понимает, например, Эмманюэль Левинас:
«Начиная с прикосновения, понятого не как осязание, но как ласка, и с языка, понятого не как средство информации, но как контакт, мы попытались описать близость как несводимую к сознанию и тематизации. Близость есть отношение, которое не может быть превращено в «образы» и выставлено напоказ. /…/ …Эта невидимость, которая становится контактом, вытекает не из того, что приближаемое не есть означающее, но скорее из совсем другого способа означивания, чем выставление видимого извне. /…/ … Близость есть отношение с единичностью без опосредования каким-либо принципом или идеальностью».[20]
/…/ … Близость есть отношение с единичностью без опосредования каким-либо принципом или идеальностью».[20]
Левинас говорит о прикосновении-ласке, в отличие от прикосновения-осязания. Различие это условно. Именно осязание как обратимость восприятия и воздействия создает возможность ласки. Чисто воспринимающее осязание переходит в осязание-воздействие: от точечного прикосновения — к поглаживанию поверхности — и далее к сжиманию плоти. Трогать — гладить — сжимать: так рождается ласка, осязательное освоение другого существа вширь и вглубь, начало близости как слияния, где я делюсь с другим своим теплом и кожей.
Разумеется, там где есть возможность наибольшей близости, там же создается и опасность наибольшего насилия и боли. Именно в силу своей «обратимости» органы осязания могут стать орудиями насилия и увечья в большей степени, чем любые другие органы восприятия. Осязание — это всегда прямая коммуникация. Вряд ли, конечно, можно сказать, что кулак «коммуницирует» с лицом, врезаясь в него, или пасть хищника «коммуницирует» с мясом пожираемой жертвы, или тело шахида, взрываясь, «коммуницирует» со взорванными телами. Но сама способность органов осязания создавать ситуацию насилия, боли, разрушения говорит об особой этической ответственности этого акта восприятия-воздействия (в их нерасторжимости, «синкретичности»).
Но сама способность органов осязания создавать ситуацию насилия, боли, разрушения говорит об особой этической ответственности этого акта восприятия-воздействия (в их нерасторжимости, «синкретичности»).
Сфера каждого чувства имеет свои этические возможности. Зрение и слух не способны причинять прямую боль именно в силу своей отчужденности от объекта. Но они обладают огромной овнешняющей, отчуждающей, репрессивной способностью, которая трудно отличима от их эпистемологической специфики. Здесь границу между холодным и теплым взглядом, участливым или отчужденным тоном голоса провести гораздо труднее, чем в сфере осязания, где разница между лаской и насилием, гладящей ладонью и ударяющим кулаком, проявляется гораздо резче, как полярность.[21]
Парадокс об осязании. Аристотель и Гегель
Философия осязания впервые получила развитие у Аристотеля, в его этике и психологии. При этом мы встречаем знаменательное противоречие между этими двумя частями его учения. Как уже отмечалось, в «Никомаховой этике» Аристотель утверждает, что именно осязание порождает грех распущенности, поскольку оно является у человека наиболее общим с другими животными и значит, отдаваясь влечениям этого чувства, он ведет себя «по-скотски».[22]
Как уже отмечалось, в «Никомаховой этике» Аристотель утверждает, что именно осязание порождает грех распущенности, поскольку оно является у человека наиболее общим с другими животными и значит, отдаваясь влечениям этого чувства, он ведет себя «по-скотски».[22]
Между тем в трактате «О душе» Аристотель утверждает, что именно развитость осязания ставит человека над всеми прочими животными и обеспечивает ему превосходство также и в разуме. Степень ума и одаренности связана с тактильными способностями, так что люди с «плотным телом», т.е. менее чувствительные к осязанию (мы бы сказали «толстокожие»), уступают умом людям с «мягким телом», наиболее чутким и отзывчивым ко всякого рода прикосновениям.
«В других чувствах человек уступает многим животным, а что касается осязания, то он далеко превосходит их в тонкости этого чувства. Именно поэтому человек самое разумное из всех живых существ. Это видно также из того, что и в человеческом роде одаренность и неодаренность зависят от этого органа чувства и ни от какого другого. Действительно, люди с плотным телом не одарены умом, люди же с мягким телом одарены умом».[23]
Действительно, люди с плотным телом не одарены умом, люди же с мягким телом одарены умом».[23]
Получается, что в осязании коренится и распущенность человека, приближающая его к животным, и разумность, возвышающая его над животными. Так можно сформулировать этот аристотелевский «парадокс об осязании» — парадокс, который нигде не заостряется и не разрешается самим Аристотелем, поскольку возникает из контраста двух его сочинений: «О душе» и «Никомаховой этики».
Нам, воспитанным на многовековой традиции логократии и семиократии, аскетически принижавшей значение «животных» чувств, гораздо легче понять инвективу Аристотеля против осязания, чем его апологию этого ощущения. В самом деле, как развитость осязания связана с мерой разумности? «Человек — животное тонко осязающее и потому разумное» – звучит как антропологическая ересь. Очевидно, сама разумность, по Аристотелю, имеет какие-то непривычные нам черты, коль скоро она обнаруживается по преимуществу в осязании.
Сам Аристотель, не давая четких аргументов в поддержку такой позиции, оставляет нам намек, почему осязание может считаться самым разумным из чувств: ведь оно в наибольшей степени способствует сохранению живого существа, предохраняет его от гибели.
«…Так как животное есть одушевленное тело и всякое тело есть нечто осязаемое, осязаемое же есть то, что воспринимается осязанием, то необходимо, чтобы и тело животного было способно к осязанию, если животное должно сохраняться. Ибо остальные чувства воспринимают через иное; таковы обоняние, зрение, слух. Если же непосредственно соприкасающееся с чем-то существо не будет обладать ощущением, то оно не сможет одного избегать, а другое приобретать. В таком случае животному невозможно будет сохраняться. Поэтому-то и вкус есть некоторого рода осязание: ведь он возбуждается пищей, пища же есть осязаемое тело. Ни звук, ни цвет, ни запах не питают и не содействуют ни росту, ни упадку. /…/ Итак, оба эти чувства необходимы всякому животному, и очевидно, что животное не может существовать без осязания. «[24]
«[24]
Здесь Аристотель дает «адаптивную» трактовку чувства осязания, как необходимого для сохранения животного в его взаимодействии с природной средой. Осязательное для других, но само неспособное осязать обречено на гибель. Возможно, мысль Аристотеля проливает свет и на само происхождение «голой обезьяны», как иногда называют человека в отличие от всех остальных приматов, живых и вымерших, в том числе от его прямых предков. Утрата волосяного покрова, до сих пор не нашедшая себе общепринятого объяснения, может быть обусловлена именно эволюционной ценностью осязания, чувствительность которого утончается по мере «облысения» кожи. То, что тактильное и интеллектуальное развитие напрямую связаны, проявляется, в частности в таких развивающих играх, которые щекоткой ладони, растиранием и сгибанием пальцев стимулируют чувствительность осязания у младенцев («Сорока-белобока кашку варила…»).
Существовать в мире означает граничить с миром, т.е. одновременно быть в мире и быть вне его. Именно в этой граничности, в соблюдении и осторожном пересечении границы между собой и миром и состоит основание разумности, и оно сопряжено с тонкостью осязания, то есть с умением отграничивать себя от мира. Прикосновение есть акт мудрости, поскольку оно позволяет установить взаимно согласованную границу между мной и не-мной, а значит, и неприкосновенность моей территории, прилегающей к территории другого. Глупость – несоблюдение границы, а смерть – ее окончательная утрата, растворение тела в окружающей природе. Напомню известные слова американского теолога Рейнолда Нибура (Reinhold Niebuhr) : «Господи, дай мне благодать принять безмятежно вещи, которые нельзя изменить; мужество — чтобы изменить вещи, подлежащие изменению; и мудрость — отличить одно от другого». Мудрость — это и есть способность различать между тем, что я могу изменить, двигаясь вовне, и тем, что я должен принять, оставаясь в себе. Чувственный аналог или метафора мудрости — это кожа как граница меня и не-меня, точнее, осязание как динамическая способность определять эту границу вo всех ее смещениях.
Именно в этой граничности, в соблюдении и осторожном пересечении границы между собой и миром и состоит основание разумности, и оно сопряжено с тонкостью осязания, то есть с умением отграничивать себя от мира. Прикосновение есть акт мудрости, поскольку оно позволяет установить взаимно согласованную границу между мной и не-мной, а значит, и неприкосновенность моей территории, прилегающей к территории другого. Глупость – несоблюдение границы, а смерть – ее окончательная утрата, растворение тела в окружающей природе. Напомню известные слова американского теолога Рейнолда Нибура (Reinhold Niebuhr) : «Господи, дай мне благодать принять безмятежно вещи, которые нельзя изменить; мужество — чтобы изменить вещи, подлежащие изменению; и мудрость — отличить одно от другого». Мудрость — это и есть способность различать между тем, что я могу изменить, двигаясь вовне, и тем, что я должен принять, оставаясь в себе. Чувственный аналог или метафора мудрости — это кожа как граница меня и не-меня, точнее, осязание как динамическая способность определять эту границу вo всех ее смещениях.
Прикосновение очерчивает границы неприкосновенного. Прикосновение дает понять мне, где кончается мое и начинается чужое — и оно же дает понять другому, где кончается он и начинаюсь я. Боль, которую испытывает тело от недолжного, нежелательного вторжения чужого (укола, удара, толчка), в первую очередь ощущается кожей (отсюда и поговорка — «испытать на собственной шкуре»). Все то, что философы писали о «я» и «не-я» как основных категориях смыслополагания, первоначально дается и различается именно в осязании, в коже какосязающейгранице себя и не-себя.
В зрении осязание выходит за пределы кожи и прикасается к отдаленным вещам, ощупывая их как бы на расстоянии (отсюда метафора «щупать глазами»). Зрение в этом смысле «глупее» осязания, поскольку, устанавливая дистанцию по отношению к чужому, не отвечает страданием на нарушение этой границы. Осязание — источник мудрости, тогда как зрение — поставщик многих знаний, которые служат этой мудрости. Зрение, утратившее ученическую связь с осязанием, становится просто глупым, переходя с вещи на вещь и не умея выстроить их в разумной последовательности, которая определяется осязательным чувством своего в отличие от другого.
Зрение, утратившее ученическую связь с осязанием, становится просто глупым, переходя с вещи на вещь и не умея выстроить их в разумной последовательности, которая определяется осязательным чувством своего в отличие от другого.
То, что переходит границу, и то, что сохраняет ее, есть одно и то же — прикосновение. Вот почему «разумность» осязания неотделима от его «распущенности». То, что Аристотель называет «распущенностью», есть приверженность к ощупыванию чужого, осязательная зависимость от чужого, страсть прикасаться к чужому (телу, имуществу), желание все время переходить границу между собой и другим. В этом смысле ни зрение, ни слух не могут быть столь «распущенны», как осязание, поскольку они дистанционны, сверхграничны по своей природе. Неприличие зрения и слуха может состоять только в том, чтобы исподтишка проникать в области, для них не предназначенные, подслушивать чужой разговор, раздевать взглядом, подсматривать в щелку, то есть присваивать себе чужое в его сокровенности, для-себя-предназначенности. Но именно потому, что осязание не может «подглядывать», т.е. быть в позиции «чистого» субъекта, его распущенность более проста и откровенна — она не может скрыть себя от объекта, она выставляет себя напоказ, точнее, «наосяз», она сама осязаема. Добродетель осязания — чувствительно воспринимать внешнее, а его порок — чувственно зависеть от внешнего. Вероятно, чем тоньше и чувствительнее осязание, тем больше оно подвержено этому пороку.
Но именно потому, что осязание не может «подглядывать», т.е. быть в позиции «чистого» субъекта, его распущенность более проста и откровенна — она не может скрыть себя от объекта, она выставляет себя напоказ, точнее, «наосяз», она сама осязаема. Добродетель осязания — чувствительно воспринимать внешнее, а его порок — чувственно зависеть от внешнего. Вероятно, чем тоньше и чувствительнее осязание, тем больше оно подвержено этому пороку.
Именно в подходе к проблеме осязания заостряется внутренняя противоречивость не только аристотелевского учения, но целой системы западного миросозерцания, которое пытается преодолеть платоновский дуализм идей и вещей, соединить идеальность с материальностью, логику — с эмпирикой. С одной стороны, осязание оказывается самым низменным, «материальным» из чувств, с другой — оно воплощает в себе разумное устройство самой природы, которая делает живое существо восприимчивым к внешним воздействиям, а разумное существо наделяет особой чувствительностью, тонкокожестью.
Показательно, что этот же парадокс об осязании обнаруживается у Гегеля, причем тоже неосознанно для самого мыслителя, в двух разных его трудах: «Наука логики» и «Энциклопедия философских наук». С одной стороны, в осязании отношение между двумя индивидами достигает наивысшей конкретности, а «конкретность» есть одно из самых похвальных слов в гегелевском лексиконе: «Осязание есть конкретнейшее из всех чувств… Поэтому, собственно говоря, впервые только для осязания существует некоторое для себя существующее другое, для себя сущее индивидуальное, в противоположность ощущающему существу, как равным образом некоторому для себя сущему индивидуальному. /…/Вообще, только для осязания существует материальное для-себя-бытие».[25]
С другой стороны, осязание, по Гегелю, — ничтожнейшее из чувств, поскольку оно обращено к чувственной, внеразумной данности вещей: «…Следует отбросить мнение, будто истина есть нечто осязаемое. …Лишь в своем понятии нечто обладает действительностью; поскольку же оно отлично от своего понятия, оно перестает быть действительным и есть нечто ничтожное; осязаемость и чувственное вовне-себя-бытие принадлежат этой ничтожной стороне». [26]
[26]
И у Гегеля, как и у Аристотеля, парадокс об осязании — это не пустое противоречие, не ошибка мыслителя, но внутренняя антиномичность самой философии, которая открывает идео-форму — в материи, ищет идеально-разумного — в действительности. Там, где мыслители следуют основным тематическим линиям своей философии: соотношение материи и формы или историческое саморазвитие Абсолютной Идеи, — там, кажется, концы сходятся с концами. Разум закругляется в действительность, форма (у Аристотеля) или идея (у Гегеля) полностью проникают материю, разумное становится действительным, а действительное разумным…
Но осязание — последнее в иерархии физических чувств — это сравнительно мелкий вопрос, который философы не успевают последовательно очертить. Так обнажаются нестыковки, зазубрины в гладком построении системы. Гегель считает осязание конкретнейшим из всех чувств, для которого впервые «существует некоторое для себя существующее другое», — и вместе с тем категорически отвергает, что истина есть нечто осязаемое. Как будто не сам же Гегель выдвинул положение о том, что истина конкретна и что путь познания есть восхождение от абстрактного к конкретному. «Если истина абстрактна, то она — не истина. Здравый человеческий разум стремится к конкретному; лишь рассудочная рефлексия есть абстрактная теория, она не истина — она правильна лишь в голове — и, между прочим, также и не практична; философия же наиболее враждебна абстрактному и ведет нас обратно к конкретному…. Истинное, дух — конкретен…»[27]
Возникает вопрос: если осязание, по Гегелю, есть «конкретнейшее из чувств», и если «истинное, дух — конкретен», то почему осязаемость бытия принадлежит к «ничтожной» его стороне?
Это как раз тот шов, который образуется наложением разума на действительность. То, что Аристотель и Гегель «спотыкаются» по вопросу об осязании, противоречат сами себе, — это маленькая, но глубокая трещина в самом фундаменте западной цивилизации, которая ведет в ее подполье, в историческую непримиренность и непримиримость разума и чувственности.
Осязание себя в другом. Мерло-Понти и Бахтин
Mногие психологи отмечают разницу между активным и пассивным прикосновением, хотя и объясняют ее не собственно осязательными, а скорее кинэстетическими ощущениями, которые определяются напряжением мускулов, рецепторами, воспринимающими движение в пространстве. Почти все экспериментальные психофизиологические исследования долгое время концентрировались на пассивном осязании и практически не обнаружили существенно иных параметров активного осязания, кроме кинэстетических. «Различие между твердым и мягким… есть, главным образом, различие в степени сопротивления, которое испытывает рука, а это означает разницу в степени давления, оказываемого одной суставной поверхностью на другую. Различие, таким образом, относится к суставам скорее, чем к коже,»- писал Э. Титченер.[28] Приведем на этот счет суждения более поздних авторов.
«Почему активное осязание игнорировалось большинством психологов в их исследованиях кожного ощущения? Наверное, наиболее важная причина — то, что активное осязание, как указал Гриффинг, затрагивает не только кожные, но и кинестетические ощущения. Даже и это слишком упрощенный ответ, поскольку зрительные и другие ощущения также могут играть роль. В мерцающем свете классической теории тактильности утрачивается противоположность между активным и пассивным осязанием и не предусматривается различие между движением кожи и движением по коже перципиента.»[29]
«В целом, — как замечает Гибсон, — экспериментаторы не осознали, что приложить источник раздражения (stimulus) к наблюдателю — не то же самое, что самому наблюдателю добыть источник раздражения».[30] «Маленькие количественные данные, какими мы располагаем, указывают, что острота кожных ощущений возрастает при активном осязании-исследовании сравнительно с пассивным восприятием».[31]
Какое значение эта психофизиологическая разница может иметь для межличностных отношений и экзистенциального самоопределения личности? В своем анализе тактильного восприятия Морис Мерло-Понти подчеркивает различие между активным и пассивным осязанием — не количественную интенсивность и степень их остроты, но их качественную несводимость друг к другу:
«Трогать — и трогать себя… Они не совпадают в теле: трогающее — никогда не то же самое, что тронутое. Это не значит, что они совпадают «в уме» или на уровне «сознания». Нечто иное, чем тело, требуется для соединения одного с другим: оно имеет место в неприкасаемом. В том ином, чего я никогда не коснусь. Но того, чего я никогда не коснусь, другой тоже никогда не коснется; здесь «я» не имеет преимуществ над другим…»[32]
В феноменологии восприятия Мерло-Понти то, чем мы видим, само не может быть увидено. То, чем мы слышим, само не может быть услышано. Я никогда не могу коснуться в себе того, чем я касаюсь других. Осязающее не может быть осязаемо, и в этом зазоре между ними — бытийность бытийствующего, несводимость субъектного к объектному. Это невидимое, неслышимое и неприкосновенное в нашем зрении, слухе и касаниях находятся не просто в пространственно недоступном месте, но как бы образуют выход в иное измерение.
В случае осязания эта разница между осязающим и осязаемым сводится к минимуму, как показывают и психофизиологические исследования, и человеческий опыт прикосновения. Можно видеть — и не быть видимым, но нельзя осязать живое — и остаться неосязаемым (ответное осязание, конечно, может оставаться за пределом сознания осязаемого, если, например, мы касаемся спящего). Но Мерло-Понти прав в том, что осязающее все-таки остается за пределом осязания. Даже если кожей своего пальца мы осязаем кожу своей же шеи и одновременно кожей шеи ощущаем кожу пальца, палец не ощущает в шее того, чем шея ощущает палец. То, что в шее прикасается к пальцу, остается неприкосновенным для пальца, и наоборот. То есть даже в отношении себя к себе остается — и собственно, даже удваивается — наша инаковость по отношению к себе. Осязание, в этом смысле, сгущает наше переживание самоинаковости, чужести себя, по сравнению, например, со зрением, поскольку мы не можем глядеть в собственные глаза, но можем осязать осязающее, больше того, не можем не осязать того, чем мы осязаем себя. Потирая руки, сплетая пальцы, складывая ладони мы постоянно осязаем то в себе, чем осязаем себя, но при этом остается некий зазор, «слепая» точка в наших осязательных ощущениях, то неприкасаемое, что, касаясь себя, все-таки не поддается прикосновению.
М. М. Бахтин, вероятно, провел бы дальше анализ осязания, начатый Мерло-Понти: он показал бы, что это неприкасаемое в нас открывается только прикосновению кого-то другого, «вненаходимого», и в свою очередь, касаясь другого, мы можем прикоснуться через него к тому, что остается неприкасаемым для нас в нас самих. Другой нужен мне не только как другой, но и как свидетель и «осязатель» меня самого. Таковым свидетелем себя я быть не могу, ибо иноположен, как объект, себе как субъекту, неспособен вместить себя в грани своего восприятия. Но в другом я могу распознать свой отраженный образ и даже вернуть его себе, объемля себя в другом, как и другого в себе. «Ведь даже свою собственную наружность человек сам не может по-настоящему увидеть и осмыслить в ее целом, никакие зеркала и снимки ему не помогут; его подлинную наружность могут увидеть и понять только другие люди, благодаря своей пространственной вненаходимости и благодаря тому, что они другие».[33]
Если для Мерло-Понти «я» не пользуется никаким преимуществом перед другим в восприятии себя, то у Бахтина другой имеет бесспорное преимущество передо мной в восприятии меня самого. В наброске к «Очеркам по философской антропологии» Бахтин пишет: «Что во мне дано мне непосредственно и что — только через другого. /…/ Не-я во мне, то есть бытие во мне, нечто большее меня во мне. /…/ Мне не даны мои временные и мои пространственные границы, но другой дан весь».[34] Очевидно, что и я весь дан другому, в тех пространственно-временных границах, которые выходят за предел меня-для-себя и образуют «не-я» во мне, то самое бытие, которое Мерло-Понти описывает как «онтологическую значимость». «Неприкосновенное прикосновения, незримое зрения, бессознательное сознания… есть другая сторона, или изнанка (или иное измерение) ощутимого Бытия…»[35] Все это во мне, скрытое от меня самого, хотя бы отчасти открывается восприятию другого. Другая сторона, «изнанка» меня предстает другому в силу его вненаходимости. Ему дано видеть мой затылок, касаться моей спины, созерцать извне те границы, внутри которых я нахожусь и которые не могу вполне воспринимать именно потому, что они ограничивают меня и мое восприятие.
Зато, воспринимая другого в его целостности, как вненаходимый по отношению к нему, я могу воспринимать в нем и то, что воспринято в нем от меня — мой след, мое отражение в другом. Следовательно, через другого я могу восполнять свой образ в себе, касаться неприкасаемого в себе — той самой изнанки, которая всегда остается вне поля моего восприятия. Другой мне дан не только как другой, но и как свидетель/слушатель/осязатель меня самого.
Не есть ли любовная близость еще и потребность воссоединения с самим собой — через значимого другого, единственно полного, объемлющего меня свидетеля-осязателя? Обнимая его, мы объемлем то, что обнимало нас, мы касаемся того, что касалось нас там, где мы не можем себя коснуться. Заглядывая в его глаза, мы видим себя такими, какими сами неспособны видеть себя, — видим свое невидимое. Целуя губы, которые целуют тебя — там, где ты сам не способен целовать себя, — ты целуешь в них собственный вкус и запах, точнее, соединение их вкуса и запаха со своим. Мы восходим на новую ступень самоощущения, объемля в другом свое иное, недоступное себе — свою вненаходимое бытие.
Вот эта чувственная трансценденция себя через другого и образует особый мир любовного волнения, непрестанно восходящего к новому уровню самопредстояния в другом. Все, чем мы становимся в любви неведомо для себя, заново открывается нашему ведению в том, кого мы любим. В другом мы целуем нецелуемое в себе. Возрастая и «оцеливаясь», мы, естественно, постоянно обретаем новое неподвластное и неведомое себе бытие, которое каждое мгновение заново открываем в другом. Любовь к другому, любящему нас, позволяет нам воссоедиться с той своей «изнанкой», которая лишь ему доступна.[36]
Эстетика и хаптика
Известно, что наряду с логикой, наукой о мышлении, существует еще эстетика — область «низшего», как считали в 18-ом веке, чувственного познания. Немецкий философ Александр Баумгартен, заложивший основы эстетики, различал «постигаемое умом…, познаваемое высшей способностью, объект логики» и «чувственно воспринимаемые знаки чувственного — объект эстетики.» Для него эстетика есть «низшая гносеология», «наука о чувственном познании».[37]
Но эстетика, как она сложилась в кругу гуманитарных дисциплин, оказалась скорее наукой об искусстве и о художественных формах прекрасного и безобразного, высокого и низкого, трагического и комического. Между тем в искусстве далеко не все способы чувственного познания участвуют на равных. Искусство, в том виде, как оно существует сегодня, — прерогатива двух чувств: зрения и слуха (изобразительные, музыкальные искусства, литература — синтез устного и письменного, звучащего и зримого слова, и т.д.). Обоняние и вкус лишь в минимальной степени затребованы в области искусств, где им принадлежат лишь две боковые, прикладные ветви — парфюмерия и кулинария (если считать таковые искусствами). Осязание же вообще оказалось за пределом эстетики, поскольку ни одно из искусств не связало свою судьбу с этим «низшим» из чувств.
Получается, что и в чувственном познании, низшем по сравнению с рациональным, логическим, выделяются свои высшие и низшие ступени, и эстетика занимается почти исключительно двумя «высшими» — зрением и слухом: только они оказываются причастны к созданию и восприятию искусства. Какая же дисциплина занимается тремя «низшими» видами чувственного познания? Оставим сейчас обоняние и вкус в стороне, отчасти потому, что они все-таки охвачены эстетикой в той или иной степени, как составляющие прикладных искусств. Обратимся к осязанию — и попробуем сфомулировать для него основоположения особой науки, отличной от эстетики. Это различие тем более велико, что эстетика, как проницательно заметил Баумгартен, имеет дело с «чувственно воспринимаемыми знаками чувственного» — и это верно для зрения и для слуха, тогда как осязание тяготеет к восприятию чувственного без опосредующих знаков, к чувственности как таковой.
Следуя за Баумгартеном, назвавшему «низшую» логику «эстетикой», «низшую» эстетику можно назватъ «хаптикой». Хаптика — это наука о «низшем из низших» родов познания, о чувственном познании без посредства чувственных знаков. В ряду наук о познании хаптика будет стоять рядом с эстетикой, но с противоположного края, чем логика, отличаясь от эстетики примерно так, как сама эстетика отличается от логики — сдвигаясь еще далее в сторону чувственности как таковой.
ЛОГИКА ЭСТЕТИКА ХАПТИКА
чистое мышление искусство, зрительные осязание как основа
общие понятия и слуховые образы познания и творчества
Возможны ли в этой «низшей» сфере познание и творчество, своя система ценностей? Мы ответим словами Баумгартена, обращенными к тем критикам, для которых уже переход от логики к эстетике был непривычен и, хуже того, неприличен, поскольку потакал запросам плоти, «распущенности» низших чувств:
«Могут возразить, в-десятых: низшие способности, плоть скорее следует подавлять, чем возбуждать и подкреплять. Ответ: а) нужно господство над низшими способностями, но не тирания над ними; б) к такому, естественно обретаемому господству как бы за руку приводит эстетика; в) эстетики не должны возбуждать и подкреплять низшие способности в качестве порочных, а должны ими руководить, чтобы они не повреждались еще более от своего пагубного применения или чтобы под предлогом избегать злоупотребления ими, предлогом, прикрывающим лень, не упразднялось бы вовсе пользование свыше данным талантом».[38]
В центре хаптики — тоже искусство своего рода, но пренебрегаемое эстетикой даже больше, чем парфюмерия и кулинария, хотя это искусство выполняет цель продолжения человеческого рода и задает смысл всему телесному существованию человека. Это ars amatoria, искусство любви, точнее, осязательных переживаний и постижений, которые полнее всего проявляются в любви, как плотском познании и творчестве. Эпистемология и логика, как правило, игнорируют тот факт, что «познание» во многих европейских языках, вслед за библейским употреблением этого слова, означает еще и чувственную любовь, взаимное познание мужчины и женщины. Этот изъян и призвана восполнить хаптика, в центре которой — учение о прикосновении как способе познавательной и творческой деятельности. При этом можно выделить две совершенно разные разновидности осязательного искусства: (1) эротическое искусство осязательного взаимодействия одушевленных тел и (2) тактильное искусство создания вещей, предназначенных для осязательного восприятия.
От эстетической теории осязания естественно перейти к практической части данного раздела, посвященной тактильному искусству (touch art), т.е. осязательному творчеству и восприятию вещей. Следующий раздел, «Эрос», будет уже целиком посвящен ars amatoria, т.е. высшей ступени осязательного искусства, которое воплощается в отношениях человеческих тел и создает из них новое одухотворенное единство.
1. Напомним, что кинестезия (от. греч. «kinesis», движение, и «esthesia», чувство, восприятие) — область ощущений, связанных с движениями нашего тела, которые возникают благодаря работе «проприорецепторов» — рецепторов мыщц, сухожилий и соединительной ткани, покрывающей внутренние органы.
2. «В осязании выделяют ощущения прикосновения и давления (тактильная чувствительность), тепла и холода (см. Термоцепция), боли (ноцицептивная чувствительность) и др. смешанные ощущения… Осязательное восприятие предметов внешней среды позволяет оценивать их форму, размеры, свойства поверхности, консистенцию, температуру, сухость и влажность, положение и перемещение в пространстве». Большой Энциклопедический Словарь. Биология. М., Большая Российская энциклопедия, 1999, с. 437.
3. Аристотель. О душе. Соч. в 4 тт., т.1, М.: Мысль, 1975, с. 447.
4. Макс Фасмер. Этимологический словарь русского языка, тт. 1-4. М., Прогресс, 1986-1987, т.4, с. 222.
5. Jillyn Smith. Senses and Sensibilities. New York a.o. Wiley Science Editions. John Wilew&Sons, Inc.,1989, p.196.
6. Ibid., p.199.
7. Winfried Noth. Handbook of Semiotics. Bloomington and Indianapolis: Indiana University Press, 1995, p. 407.
8. М. Л. Бутовская. Язык тела: природа и культура (эволюционные и кросс-культурные основы невербальной коммуникации человека). М.: Научный мир, 2004, с. 124. Глава 6 этой книги, «Тактильная коммуникация» (сс. 111-129), может служить хорошим введением в антропологию осязания.
9. Хосе Ортега-и-Гассет. Человек и люди, в его кн. Дегуманизация искусства и другие работы. М., Радуга, 1991, с. 286. Ортега-и-Гассет не совсем прав, ссылаясь на психофизиологию. Любая клетка обладает чувствительностью к разным внешним воздействиям: механическим, химическим, световым. Когда стали выделяться специальные чувствительные клетки-рецепторы, среди них сразу началась специализация на осязательные рецепторы, хеморецепторы, механо- и фото-рецепторы. Впрочем, в некоторых клетках разные функции могли совмещаться.
10. Основатель и директор — Николас Олбери. См. сайты www.globalideasbank.org/site/home/ и www.DoBe.org
11. «Прикосновение, а также возложение (жертвоприношение) были наиболее типичными формами клятвы и проклятия. …Вполне возможно допустить соотношение рус. глаголов класть и клясть. Типологически ср.: праформа *pri-sega «клятва» буквально означает касание рукой…» М. М. Маковский. Сравнительный словарь мифологической символики в индоевропейских языках. Образ мира и миры образов. М.: Гуманитарный издательский центр ВЛАДОС, 1996, с. 187.
Связь «клятвенности» и «клейкости», далеко не только аллитерационная (начальное «кл») интуитивно выражена в поэзии О. Мандельштама: «Клейкой клятвой пахнут почки…», «И к губам такие липнут клятвы…» (из стихотворения, обращенного к Наталье Штемпель). Здесь, быть может, отозвались другие «клейкие весенние листочки», которыми «клянется» Иван Карамазов, присягая на верность жизни, вопреки всем разочарованиям в ее смысле. (Ф. Достоевский. Братья Карамазовы, ч.1, кн. 5, III).
12. Цит. по кн. Fred Kaplan. Henry James: The Imagination of Genius. New York: Morrow,1992, p . 409.
13. См. статью «Органы чувств» в любом энциклопедическом издании.
14. E. B. Titchener. A textbook of psychology. New York , Macxmillan, 1910; David Katz. The World of Touch (1925). Ed. and transl. by Lester E. Krueger. Hillsdale (New Jersy) Hove and London , Lawrence Erlbaum Associates, publishers, 1989; Ashley Montagu. Touching : The Human Significance of the Skin. NY: HarperCollins, 1986.
15, ————————————————
1. 2. Обширная библиография по психофизической и техно — компьютерной хаптике составлена Маргарет Мински : Haptics Bibliography http://marg.www.media.mit.edu/people/marg/haptics-bibliography.html
16. Sidney Perkowitz. You don уt have to hug your computer, but touching it might have unexpected benefits. New Scientist, 11 September 1999, pp. 34 -37
17. Никомахова этика, 1118а-1118б. Аристотель. Собр. соч. в 4 тт., т.4, М., «Мысль», 1983, сс. 116-117.
18. David Katz. Тhe World of Touch (1925). Ed. and transl. by Lester E. Krueger. Hillsdale, New Jersy, Hove and London, Lawrence Erlbaum Associates, publishers, 1989, pp. 126, 127.
19. Э. Гуссерль. Идеи к чистой феноменологии и феноменологической философии, цит. по кн. Валерий Подорога. Феноменология тела. М., Ad Marginem, 1995, с.123.
20. Emmanuel Levinas. Basic Philosophical Writings, ed. by Adrian T. Peperzak, Simon Critchley, and Robert Bernasconi. Bloomington and Indianapolis: Indiana University Press, 1996, pp. 80, 81.
21. Полюса тоже могут совмещаться, но это уже отдельный случай амбивалентности прикосновения — садо-мазохизм, «если бьет, значит, любит» и т.п.
22. Распущенность «возникает всегда благодаря осязанию — как при еде, так и при питье и при так называемых любовных утехах. /…/Наслаждаться такими чувствами, т.е. иметь к ним исключительное пристрастие, — /значит жить/ по-скотски.» Аристотель, Никомахова этика, 1118а-1118б, цит. изд., т.4, сс. 116-117.
23. Аристотель. О душе, цит. изд., т.1, с. 415.
24. Там же, с. 446.
25. Г. В. Ф. Гегель. Энциклопедия философских наук, т. 3, Философия духа, М., Мысль. 1977, с. 113.
26. Г. В. Ф. Гегель. Наука логики, т.1, М., «Мысль», 1970, сс. 103, 104.
27. Г. В. Ф. Гегель. Лекции по истории философии. 2. Разъяснения, необходимые для определения понятия истории философии. b. Понятие конкретного.
28. E. B. Titchener. A textbook of psychology. New York, Macxmillan, 1910, p.171.
29. Joseph C. Stevens and Barry G. Green. History of Research on Feeling, in Handbook of Perception, vol. YI B. Feeling and Hurting, ed. by C. Carterrette and Morton P. Friedman. New York , San Francisco , London : Academic Press, 1978, p.19.
30. Gibson J.J. Observations on Active Touch. Psychological Review, 1962, No.69, p.490.
31. Dan R. Kenshalo, Sr. Biophysics and Psychophysics of Feeling, in Handbook of Perception, op. cit, p.48. 171.
32. Maurice Merleau-Ponty. The Visible and the Invisible, followed by working notes (note of May 1960). Ed. by Claude Lefort. Evanston : Northwestern University Press, 1968, p. 254.
33. М. М. Бахтин. Эстетика словесного творчества. М., Искусство, 1979, с. 334.
34. T ам же, с. 351.
35. Maurice Merleau-Ponty, op. cit., p. 255.
36. Подробнее эта тема развивается в разделе «Эрос», в главах «Секс — эрос — любовь» и «Любовь-кольцо. Предлог «в» и кружево тел»
37. Цит. по История эстетики. Памятники мировой эстретической мысли в 5 тт., т.2, М., «Искусство», 1964, с. 452.
38. Там же, с. 454.
Чувствовать кожей: как открытие тайн осязания принесло ученым Нобелевскую премию
Нобелевскую премию по физиологии и медицине присудили ученым, выяснившим, что позволяет нам чувствовать холод, тепло и касание. Эта способность интриговала философов на протяжении веков, а теперь добытые лауреатами знания могут пригодиться для лечения многих заболеваний.
Жгучий интерес
Уже в первой половине XX века ученые знали — за осязательные ощущения отвечают особые нервные клетки. Они узкоспециализированы: например, за ощущение касания отвечают одни нейроны, а за боль — другие. Но долго оставалось загадкой, каким образом прикосновение или изменение температуры возбуждают в нервной клетке электрический сигнал.
Дэвид Джулиус из Калифорнийского университета в Сан-Франциско пришел к ответу с неожиданной стороны. В 1990-х годах он исследовал капсаицин — вещество, создающее знаменитый жгучий вкус красного перца. К тому моменту уже было известно, что это соединение активирует осязательные нейроны, реагирующие на боль, тепло или прикосновение. Но какие именно и как — оставалось загадкой.
Реклама на Forbes
Джулиус и его коллеги стремились выявить ген восприятия капсаицина. Выделить его среди многочисленных генов, работающих (или, как говорят ученые, экспрессирующихся) во всех «подозрительных» нейронах, было нелегко. Исследователям пришлось создать библиотеку из миллионов фрагментов ДНК, притом что общее количество генов в геноме человека — на несколько порядков меньше.
Биологи культивировали клетки, которые в норме не реагируют на капсаицин, внедряли в них гены из «списка подозреваемых» и проверяли, не появится ли у клеток чувствительность к капсаицину. После кропотливых поисков ген восприятия этого жгучего вещества наконец был обнаружен. Оставалось понять, как именно этот ген работает в нейронах, чувствительных к капсаицину.
Поясним, что любой ген — это инструкция для клетки по синтезу того или иного белка (как говорят специалисты, ген кодирует белок). А белки — это основные участники всех биохимических процессов, шестеренки сложнейшей машины, именуемой живой клеткой. Кредо клетки можно выразить так: «Хочешь что-то сделать — синтезируй белок, который этим занимается. Хочешь синтезировать белок — имей ген, который его кодирует».
Чем же занимается белок (позже он был назван TRPV1), синтезируемый «капсаициновым» геном? Оказалось, что это ионный канал в мембране нервной клетки. Чтобы объяснить, что это такое, придется совершить экскурс в нейробиологию.
Нервное волокно — это цепочка соединенных друг с другом нейронов. Нервный импульс распространяется вдоль волокна по мембранам (стенкам) нейронов. Но это не ток, текущий по проводу, а волна электрического поля. Она создается током ионов (заряженных частиц), текущим поперек пути распространения нервного импульса: сквозь мембрану, из клетки во внешнюю среду или обратно. «Проводами» для этих ионов служат пересекающие мембрану крупные молекулы белка — ионные каналы.
Чтобы ионный канал открылся, на него нужно подействовать определенным раздражителем, например химическим. Как выяснилось, канал TRPV1 активируется капсаицином. Продолжая эксперименты, Джулиус обнаружил, что канал TRPV1 активируется также и при сильном нагревании. Именно при сильном — он не реагирует на приятное тепло, а сигнализирует, что участок кожи или слизистой оболочки опасно перегрелся.
Так был открыт механизм работы нейронов, чувствительных к контакту с горячими предметами. Попутно выяснилось, что «жгучий вкус» — не метафора, а нейробиологическая истинаТак был открыт механизм работы нейронов, чувствительных к контакту с горячими предметами. Попутно выяснилось, что «жгучий вкус» — не метафора, а нейробиологическая истина: на капсаицин наша нервная система реагирует так же, как на обжигающее прикосновение.
Позже выяснилось, что TRPV1 отвечает также за мучительное жжение, которое может возникать при воспалениях и других нарушениях в работе нервов или внутренних органов. Поэтому его исследования могут стать ключом к облегчению страданий многих людей.
В дальнейших исследованиях Дэвид Джулиус и (независимо от него) Ардем Патапутян обнаружили ионный канал TRPM8. Он был открыт благодаря еще одному веществу, вызывающему «температурные» ощущения — приятно холодящему ментолу. Канал TRPM8 активируется при переохлаждении клетки, и нейрон посылает нам сигнал, что лучше бы надеть перчатки или есть мороженое помедленнее.
Продолжая эксперименты, Джулиус обнаружил, что канал TRPV1 активируется также и при сильном нагреванииПозже были открыты и другие ионные каналы, реагирующие на изменение температуры.
Прикосновение к истине
Работая в исследовательском центре Scripps Research, Патапутян занимался и другим важным вопросом: что позволяет нам чувствовать прикосновение и давление на кожу? Вместе со своими сотрудниками биолог впервые вывел генетическую линию клеток, которые генерировали электрический сигнал, когда их мембрану протыкали микропипеткой. Ученый предполагал, что существует ионный канал, который активируется этим механическим сигналом. В поисках гена, кодирующего этот белок-канал, он проверил 72 кандидата. Экспериментаторы отключали эти гены один за другим, следя, когда клетка перестанет реагировать на укол. Затратив немало усилий, Патапутян и его коллеги идентифицировали ген Piezo1. Оказалось, что он кодирует ранее совершенно неизвестный ионный канал, который активируется давлением. Вскоре исследователи обратили внимание на ген Piezo2, очень похожий на ген Piezo1.
Это открытие вызвало к жизни целую волну научных работ. Группа Патапутяна и другие исследователи выяснили, что ионный канал Piezo2 необходим для осязания, а также для восприятия положения и движения тела.
Затем ученые выяснили, что гены Piezo1 и Piezo2 регулируют и другие важные процессы — дыхание, артериальное давление и деятельность мочевого пузыря.
Биологи продолжают тщательно исследовать роль белков TRPV1, TRPM8, Piezo1 и Piezo2 в работе нервной системы. Есть надежда, что эти знания пригодятся в лечении многих заболеваний.
Мнение редакции может не совпадать с точкой зрения автора
Реклама на Forbes
Растения Сада пяти чувств
По идее Мишеля Пена — французского архитектора, автора концепции Ландшафтного парка ВДНХ, Сад пяти чувств — это непрерывный пешеходный маршрут, проложенный в виде ленты Мебиуса. Каждый участок сада символизирует и задействует одно из пяти человеческих чувств: зрение, слух, обоняние, осязание, вкус.
Сад осязания — это сосновый бор, где прикасаясь к иголкам и коре сосны, посетители получают тактильные ощущения.
Сад звуков — место, где соседствуют липы, березы и осины колоновидной формы. Дрожание их листвы наполняет сад звуками, даря приятные ощущения нашему слуху. Массив из злаков создает звучание на нижнем ярусе сада.
В Саду запахов посетителей обволакивают ароматы множества растений. Нарциссы и мускари радуют гостей ранней весной. Спирея серая, роза ругоза и птелея трехлистная благоухают с конца весны до осени. После листопада цветет гамамелис виргинский. Дополняют картину пахнущие имбирным пряником листья багряника японского и плоды птелеи трехлистной, чей аромат можно ощутить при растирании в ладонях.
Сад вкусов — это сад, в котором растут плодовые кустарники: арония, голубика, крыжовник, черная и красная смородины. Здесь также произрастают шалфей, полынь и другие пряные травы, которые пробуждают нашу вкусовую память и вызывают знакомые кулинарные ассоциации.
Сад зрительных ощущений представляет собой яркий цветник, радующий глаз. В самое теплое время года эта композиция из многолетников имеет максимальную цветовую насыщенность. Ранней весной здесь цветут луковичные растения, а в зимний период особый эффект создают «фонтаны» злаковых растений.
French architect Michael Pena, who created the VDNH Landscape park concept, proposes to consider the Five Senses Garden as a seamless walking route represented in the form of a Mobius strip. Each garden section symbolises and affects one of the five human senses: sight, hearing, smell, touch and taste.
The Garden of Touch is a pine forest where visitors experience tactile sensations by touching needles and pine bark.
The Garden of Sound is a place where lindens, birches and columnar aspens coexist. Their trembling foliage fills the garden with sounds, giving our ears a pleasant sensation. An array of gramineous plants produce sounds on the lower garden level.
Visitors are surrounded by aromas from numerous plants in the Garden of Smell. Narcissus and Muscari bring joy to guests in early spring. Spiraea cinerea, rosa rugosa and ptelea trifoliata spread a sweet aroma from late spring to autumn. Hamamelis virginiana blooms after leaves fall. The range of aromas is complemented by cercidiphyllum japonicum leaves which smell like gingerbread, and ptelea trifoliata fruits which can be smelled when rubbed in-between the palms.
The Garden of Taste is a garden where fruit bushes grow: aronia, vaccinium uliginosum, grossularia, ribes nigrum and ribes rubrum. It also contains salvia, Artemisia and other spicy herbs that refresh our taste memory and evoke familiar culinary associations.
The Garden of Sight is a colourful flower garden that is pleasing the eye. This perennial composition shows the most diverse colour palette during the warmest season. Bulbous plants bloom here in spring and during winter months bunches of gramineous plants create a special effect.
根据法国建筑师,国经成就展景观公园概念的作者米歇尔·佩恩的创意,五感花园是一条以莫比乌斯环形式布局的连续步行路线。花园的每个部分都象征着五种人类感官中的一种:视觉、听觉、嗅觉、触觉、味觉。
触觉之园是一片松树林,通过触摸针叶和松树皮,游客可以获得触感。
听觉之园是柱状的椴树、桦树和白杨树枝叶相接的地方。花园里充满树叶婆娑的声音,为我们的耳朵带来愉悦感受。多种谷物在花园的下层创造出另一种音乐。
在嗅觉之园,游客被众多植物的香气所包围。水仙和葡萄风信子在早春为客人带来欢乐。灰绣线菊、玫瑰和榆橘从春末到秋天散发甜美香氛。落叶后的北美金缕梅开花。连香树叶子的姜饼香,和在掌中摩擦榆橘果实散发的香气更加沁人心脾。
味觉之园是一个种植浆果灌木的花园:山楸梅、蓝莓、醋栗、黑加仑和红加仑。这里还有鼠尾草、艾草和其他香草,唤醒我们的味觉记忆,激发熟悉的美食幻想。
视觉之园是一个令人赏心悦目的明亮花园。在最温暖的季节,这种多年生植物呈现出极致的浓郁色彩。早春时节,球茎植物在这里开花;冬季,谷类植物齐发,营造出独特的效果。
Ученые создали искусственную кожу, которая может регенерировать
Сингапурские исследователи изобрели новый пеноматериал AiFoam, который имитирует кожу для роботизированного протеза, сообщает Reuters. Основные особенности этого материала — это возможность регенерации и способность передавать тактильные ощущения.
По словам ученых из Национального университета Сингапура, пена создана путем смешения фторполимера с соединением, которое снижает поверхностное натяжение. Это позволяет искусственной коже буквально «заживлять» повреждения — пена сама заполняет порезы и другие пустоты.
Чтобы воспроизвести чувство осязания, исследователи наполнили материал микроскопическими металлическими частицами и добавили в него электроды. При давлении на кожу металлические частицы сближаются, меняя электрические поля. Эти перемены фиксируются электродами, которые передают результаты на микрокомпьютер.
«Когда я подношу палец к датчику, вы можете видеть, что он измеряет показатели электрического поля и реагирует на мое прикосновение. Существует много применений для такого материала, особенно в протезных устройствах и робототехнике, где техника должна взаимодействовать с людьми», — объяснил ведущий исследователь Бенджамин Ти.
Ти также указал на то, что их разработка может значительно упростить жизнь людей с протезами — им будет легче управлять рукой при взаимодействии с другими предметами.
По его словам, AiFoam является первым в своем роде материалом, который сочетает в себе как свойства самовосстановления, так и возможность тактильного ощущения.
На сегодняшний день ученые из разных уголков мира исследуют возможности самовосстанавливающихся материалов, в том числе для протезов, рассказала «Газете.Ru» основатель healthtech-компании AIBY Оля Осокина.
«Самый интересный из них – проект, вдохновленный зубами кальмаров. Биосинтетический полимер можно использовать для ремонта частей предметов, которые изнашиваются из-за постоянного движения, например для деталей роботов, протезов, вентиляторов и даже защитных костюмов… Другой пример – проект из Японии, применяющий металлические сплавы. Его принцип основан на том, что сплав становится жидким всего при 50 градусах, что помогает восстанавливать имитатор ахиллова сухожилия. При этом преимущество AiFoam заключается не только в самовосстановлении, но и при выборе повреждений для восстановления», — отметила Осокина.
Ссылаясь на слова исследователей, эксперт пояснила, что AiFoam можно растянуть более чем в два раза, а поверхностно-активный агент позволяет ему регенерировать даже после пореза. По ее словам, ученые проверили способность пены к самовосстановлению посредством нагревания ее в течение четырех дней, после чего материал зажил примерно на 70% и все еще мог растягиваться почти вдвое от своей первоначальной длины.
По словам руководителя департамента по развитию медицины BestDoctor Юлии Ткаченко, самые современные бионические протезы уже оснащены функцией распознавания давления и прикосновения, однако эти функции далеки от привычного нам осязания.
Однако есть большая проблема в передаче импульса с протеза в нервную систему человека — даже при длительном ношении бионических протезов многие люди так и не приобретают тактильную чувствительность, это связано с затруднением адаптации головного мозга к новым стимулам.
«Свойство самостоятельного восстановления материала делает протез более прочным к повреждениям, которые свойственны при адаптации пациента. Новая технология позволит улучшить качество создаваемых бионических протезов, однако фундаментальные проблемы протезирования она по-прежнему не решает», — считает эксперт.
Стимуляция спинного мозга вернула безруким пациентам ощущение прикосновения
Как выяснили учёные, для того чтобы вернуть осязание носителям протезов, можно использовать стандартную медицинскую процедуру. Речь идёт о стимуляции спинного мозга, которая обычно используется для лечения хронических болей. Такой вывод сделан в научной статье, опубликованной в журнале eLife.
Здоровый человек может взять в руки куриное яйцо, не раздавив его, и поднести ко рту чашку кофе, даже не взглянув на неё. Эти и другие повседневные действия кажутся очень простыми, но на деле требуют виртуозного управления собственными движениями. И важную роль в нём играет осязание. Протезы плохо заменяют живые руки в том числе и потому, что они не позволяют человеку чувствовать, к чему он прикасается.
Многие научные группы по всему миру работают над тем, чтобы вернуть пациентам с ампутированными руками способность знакомиться и общаться с миром на ощупь. Но пока специалистам по силам создать лишь несовершенное подобие осязания. И даже такой результат обычно достигается путём сложной нейрохирургической операции, которую может провести не всякий специалист.
Теперь же учёные выяснили, что ощущения, возникающие при прикосновении, можно восстановить при помощи стандартной медицинской процедуры.
«Уникальность этой работы в том, что мы используем устройства, которые уже вживляются 50 тысячам человек в год для лечения боли – врачи во всех крупных медицинских центрах страны знают, как выполнять эти хирургические процедуры, – и получаем такие же результаты, как и при применении узкоспециализированных устройств и процедур», – рассказывает соавтор исследования Ли Фишер (Lee Fisher) из Питтсбургского университета.
Ли Фишер и пациентка, участвовавшая в исследовании.
В новом исследовании приняли участие четыре добровольца, некогда переживших ампутацию руки. Им в позвоночник вживлялся имплантат, который обычно используется для эпидуральной стимуляции спинного мозга. Это широко распространённое средство лечения хронической боли. Устройство генерирует электрические импульсы, которые тормозят передачу болевых сигналов в головной мозг.
Однако на этот раз исследователи чуть-чуть изменили место внедрения имплантата. В результате его работа провоцировала у пациентов осязательные ощущения в отсутствующей руке.
Исследователи посылали электрические импульсы через разные точки вживлённых электродов, а испытуемые сообщали о своих ощущениях.
Все четыре участника отмечали, что у них появилось чувство прикосновения и давления, хотя оно часто сопровождалось нехарактерным для нормальной работы осязания покалыванием или зудом.
Учёные отмечают, что в течение всех 29 дней эксперимента имплантаты не смещались в позвоночнике испытуемых. Это очень важно, поскольку смещённое устройство может начать стимулировать «незапланированные» нервы с незапланированным же результатом.
Авторы предлагают в будущем использовать следующую схему. Протез, наделённый датчиками давления, посылает сигнал на имплантат. Тот стимулирует спинной мозг, и человек испытывает чувство прикосновения к предмету, которого он касается протезом.
Конечно, учёным предстоит преодолеть немало трудностей, прежде чем такая система станет реальностью. Например, человек должен почувствовать, коснулся ли он предмета всей ладонью или, скажем, кончиком указательного пальца. В связи с этим особенно интересно, что три из четырёх добровольцев говорили об осязательных ощущениях в конкретном пальце или небольшом участке ладони отсутствующей руки.
Исследователи подчёркивают, что их работа демонстрирует только принцип действия будущих протезов. До коммерческого продукта ещё очень далеко. Но теперь по крайней мере есть надежда, что каждый человек с протезом руки однажды сможет ощутить рукопожатие.
К слову, ранее Вести.Ru рассказывали об электронной коже, быстро и точно имитирующей осязание. Писали мы и о том, как электронные протезы «научились» чувствовать боль.
Самый быстрый словарь в мире: Vocabulary.com
тактильное ощущение ощущение, производимое рецепторами давления на коже
тактильное ощущение способность воспринимать давление, тепло или боль
вкусовое ощущение ощущение, которое возникает, когда вкусовые рецепторы на языке и в горле передают информацию о химическом составе растворимого раздражителя
кожное ощущение Ощущение, локализованное на коже
ощущение прикосновения ощущение, создаваемое рецепторами давления на коже
тактильное ощущение Ощущение, локализованное на коже
после ощущения изображение, которое сохраняется после прекращения стимуляции
бестактность качество бестактность
слуховое ощущение субъективное ощущение того, что что-то слышишь
болезненное ощущение соматическое ощущение острого дискомфорта
деколонизация действие по переходу от колониального статуса к независимому
десталинизация социальный процесс нейтрализации влияния Иосифа Сталина путем пересмотра его политики и удаления памятников, посвященных ему, и переименования мест, названных в его честь
вкусовое ощущение ощущение, которое возникает, когда вкусовые рецепторы на языке и в горле передают информацию о химическом составе растворимого раздражителя
тактильное исследование метод исследования, при котором экзаменующий чувствует размер, форму, твердость или расположение чего-либо (частей тела, если экзаменатор является медицинским работником)
соматическое ощущение восприятие осязательных или проприоцептивных или кишечных ощущений
цифровая связь электронная передача информации, закодированной в цифровом виде (для хранения и обработки компьютерами)
деколонизация действие перехода от колониального статуса к независимому
возмещение ущерба за услугу, утрату или травму
ощущение на коже ощущение, локализованное на коже
12.3B: Тактильные ощущения — Medicine LibreTexts
Прикосновение воспринимается механорецептивными нейронами, которые по-разному реагируют на давление.
Цели обучения
- Описать, как прикосновение воспринимается механорецептивными нейронами, реагирующими на давление
Ключевые моменты
- Наше осязание или тактильные ощущения обеспечивается кожными механорецепторами, расположенными в нашей коже.
- Существует четыре основных типа кожных механорецепторов: тельца Пачини, тельца Мейснера, диски Меркеля и окончания Руффини.
- Кожные механорецепторы классифицируются по морфологии, по типу ощущений, которые они воспринимают, и по скорости адаптации. Более того, у каждого есть свое рецептивное поле.
Ключевые термины
- рецептивное поле : Конкретная область сенсорного пространства (например, поверхность тела, пространство внутри уха), в которой стимул запускает возбуждение этого нейрона.
- адаптация : изменение во времени реакции сенсорной системы на постоянный раздражитель.
- Волокно Aβ : Тип сенсорного нервного волокна, передающего сигналы холода, давления и некоторых болевых сигналов.
- Волокно Aδ : переносит сенсорную информацию, связанную с вторичными окончаниями мышечного веретена, прикосновением и кинестезией.
Механорецептор — это сенсорный рецептор, который реагирует на механическое давление или искажение. Например, в периодонтальной связке есть механорецепторы, которые позволяют челюсти расслабиться при надавливании на твердые предметы; Мезэнцефалическое ядро отвечает за этот рефлекс.
Голая (безволосая) кожа подразделяется на четыре основных типа:
- Окончания Руффини.
- Тельца Мейснера.
- Пачинские тельца.
- Диски Меркель.
В волосистой коже также есть механорецепторы. Волосковые клетки в улитке являются наиболее чувствительными механорецепторами, преобразующими волны давления воздуха в нервные сигналы, посылаемые в мозг.
Кожные механорецепторы
Кожные механорецепторы расположены в коже, как и другие кожные рецепторы.Они обеспечивают осязание, давление, вибрацию, проприоцепцию и другие. Все они иннервируются волокнами Aβ, за исключением механопринимающих свободных нервных окончаний, которые иннервируются волокнами Aδ.
Их можно разделить на категории по морфологии, по типу ощущений, которые они воспринимают, и по скорости адаптации. Более того, у каждого свое восприимчивое поле:
.- Концевые органы Руффини обнаруживают напряжение глубоко в коже.
- Тельца Мейснера обнаруживают изменения текстуры (колебания около 50 Гц) и быстро адаптируются.
- Пачинианские тельца обнаруживают быстрые колебания (около 200–300 Гц).
- Диски Меркель обнаруживают длительное прикосновение и давление.
- Механорецепторы, принимающие свободные нервные окончания, обнаруживают прикосновение, давление и растяжение.
- Рецепторы волосяных фолликулов расположены в волосяных фолликулах и определяют изменение положения прядей волос.
Окончание Руффини
Окончание Руффини (тельце Руффини или луковичное тельце) представляет собой класс медленно адаптирующихся механорецепторов, которые, как считается, существуют только в голой дерме и подкожной клетчатке человека.Он назван в честь Анджело Руффини.
Этот веретенообразный рецептор чувствителен к растяжению кожи и способствует кинестетическому ощущению и контролю положения и движения пальцев. Считается, что он полезен для отслеживания скольжения предметов по поверхности кожи, позволяя модулировать захват объекта.
Окончания Руффини расположены в глубоких слоях кожи. Они регистрируют механическую информацию в суставах, в частности изменение угла, с точностью до двух градусов, а также состояния постоянного давления.Они также действуют как терморецепторы, которые долго реагируют, например, держатся за руки во время прогулки. В случае глубокого ожога тела боли не будет, так как эти рецепторы сгорят.
Тельца Мейснера
Тельца Мейснера (или тактильные тельца) отвечают за чувствительность к легкому прикосновению. В частности, они имеют самую высокую чувствительность (самый низкий порог) при обнаружении вибрации ниже 50 герц. Это быстро адаптивные рецепторы.
Тельца Пачини
Пачинианские тельца (или пластинчатые тельца) отвечают за чувствительность к вибрации и давлению. Роль вибрации может использоваться для обнаружения текстуры поверхности, например шероховатой или гладкой.
Нерв Меркель
Нервные окончания Меркеля — это механорецепторы, обнаруженные в коже и слизистой оболочке позвоночных животных, которые передают в мозг информацию касания. Информация, которую они предоставляют, касается давления и текстуры. Каждое окончание состоит из клетки Меркеля, близко соприкасающейся с увеличенным нервным окончанием.
Иногда его называют комплексом клетка Меркеля-нейрит или дисковым рецептором Меркеля. Одно ответвление афферентного нервного волокна иннервирует до 90 таких окончаний. Они относятся к медленно адаптирующимся механорецепторам типа I.
Презентация различных тактильных ощущений с использованием электротактильного дисплея с микроиглами
Abstract
Тактильные дисплеи вызывают тактильные ощущения, искусственно стимулируя тактильные рецепторы.Несмотря на то, что было разработано множество типов тактильных дисплеев, электротактильные дисплеи, использующие электрическую стимуляцию, могут быть тонкими, легкими, гибкими и, следовательно, удобными для ношения. Однако высокое напряжение, необходимое для стимуляции тактильных рецепторов, и ограниченное разнообразие возможных ощущений создают проблемы. В нашей предыдущей работе мы разработали электротактильный дисплей с использованием набора микроигольчатых электродов, который может резко снизить необходимое напряжение за счет безболезненного проникновения через высокоимпедансный роговой слой, но отображение различных тактильных ощущений все еще было проблемой.В этой работе мы демонстрируем предъявление испытуемым тактильных ощущений различной шероховатости, что обеспечивается расположением электродов; игольчатые электроды находятся на кончике пальца, а заземляющий электрод — на ногте. Благодаря такому расположению дисплей может стимулировать тактильные рецепторы, которые расположены не только в неглубоких областях пальца, но и в глубоких областях. Экспериментально было обнаружено, что требуемое напряжение было дополнительно снижено по сравнению с предыдущими устройствами и что шероховатость, представленная на дисплее, контролировалась частотой импульсов и временем переключения или скоростью потока стимуляции.Предлагаемый электротактильный дисплей легко применим в качестве нового носимого тактильного устройства для передовых информационных коммуникационных технологий.
Образец цитирования: Тэдзука М., Китамура Н., Танака К., Мики Н. (2016) Презентация различных тактильных ощущений с использованием электротактильного дисплея с микроиглами. PLoS ONE 11 (2): e0148410. https://doi.org/10.1371/journal.pone.0148410
Редактор: Слиман Дж. Бенсмайя, Чикагский университет, США
Поступила: 27 июля 2015 г .; Одобрена: 16 января 2016 г .; Опубликовано: 4 февраля 2016 г.
Авторские права: © 2016 Tezuka et al.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе.
Финансирование: Эта работа была поддержана Preursory Research for Embryonic Science and Technology (PRESTO, Information Environment and Human), Японское агентство науки и технологий (http: // www.jst.go.jp/kisoken/presto/en/). НМ получил это финансирование. Финансирующие организации не играли никакой роли в дизайне исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.
Конкурирующие интересы: Авторы заявили, что никаких конкурирующих интересов не существует.
Введение
Кожа человека имеет четыре типа тактильных рецепторов. Эти рецепторы, обладающие разными свойствами, расположены в разных местах кожи и отвечают за разные типы стимуляции [1–5].Тактильный дисплей — это интерфейс, который может вызывать у пользователя тактильные ощущения, стимулируя эти тактильные рецепторы электрически или механически деформируя кожу. Требуется, чтобы механотактильные дисплеи были способны деформировать кожу либо на несколько десятков микрометров при низкой частоте, либо на несколько микрометров или даже меньше при высокой частоте, в зависимости от рецепторов, которые необходимо стимулировать. Низкочастотная деформация кожи с большим смещением может быть достигнута с помощью штифтовых исполнительных механизмов с использованием соленоидов [6], в то время как ультразвуковые исполнительные механизмы [7–9] и электростатические исполнительные механизмы [10, 11] используются для деформации кожи небольшими смещениями при высокие частоты.Наша группа разработала ряд микроприводов, состоящих из механизмов гидравлического усиления и пьезоэлектрических приводов, которые могут стимулировать все тактильные рецепторы для создания различных тактильных ощущений, таких как шероховатость и твердость [12]. Для оценки тактильных ощущений, которые может вызывать разработанный механотактильный дисплей, мы недавно предложили метод сравнения образцов [13]. Однако высокое энергопотребление и громоздкость механотактильных дисплеев делают их непригодными для носимых устройств.
Электротактильные дисплеи стимулируют тактильные рецепторы, прикладывая напряжение к коже. Массивные плоские электроды активируются, чтобы представить пользователю тактильные ощущения [14–18]. Электроды могут быть нанесены на тонкую и гибкую подложку, что является огромным преимуществом перед громоздкими механотактильными дисплеями, особенно для носимых устройств. Однако у электротактильных дисплеев есть две основные проблемы; им требуется высокое напряжение в несколько десятков вольт для стимуляции тактильных рецепторов, и они могут вызывать лишь ограниченное разнообразие ощущений у пользователя, которые обычно ощущают электричество и жало.Высокое напряжение необходимо из-за высокого импеданса (100 кОм · м) рогового слоя, самого внешнего слоя эпидермиса [19]. В нашей предыдущей работе мы разработали электротактильный дисплей, который состоит из массива титановых микроигольчатых электродов [20]. Электроды были изготовлены с острыми кончиками для проникновения через роговой слой, но достаточно короткими, чтобы не доходить до болевых точек. Дисплей резко снизил необходимое напряжение, то есть пороговое напряжение, для создания тактильных ощущений по сравнению с устройствами с плоским электродом.Как показано на фиг. 1 (а), матрица микроигольчатых электродов имела семь электродов; электрод в центре функционировал как активный электрод, а шесть окружающих электродов — как заземляющие электроды. Хотя пороговое напряжение было успешно снижено, тактильные ощущения, вызываемые дисплеем, по-прежнему ограничивались электрическими ощущениями и ощущениями покалывания. Мы считали, что при таком расположении электродов стимулирующие токи проходят и стимулируют тактильные рецепторы только в неглубокой области кожи.Хорошо известно, что четыре типа тактильных рецепторов отвечают за различные типы стимулов и расположены внутри кожи таким образом, что могут иметь самую высокую чувствительность. Следовательно, для создания различных тактильных ощущений расположение электродов необходимо изменить так, чтобы можно было стимулировать все типы тактильных рецепторов.
Рис. 1. Концептуальные изображения электротактильных дисплеев.
(a) Электротактильный дисплей, состоящий из микроигольчатых электродов [20].Электрод истока расположен в центре электродной решетки, и стимулирующий ток проходит только через неглубокую область кожи пальца. (b) Недавно предложенное «двустороннее игольчатое устройство» с заземляющим электродом на ногте. Стимулирующий ток проходит через палец и стимулирует все тактильные рецепторы, распределенные в коже.
https://doi.org/10.1371/journal.pone.0148410.g001
В этой статье мы предлагаем тактильный дисплей, состоящий из набора микроигольных электродов на кончике пальца и плоского электрода на ногте, как показано на Рис. 1 (б).Мы называем это новое устройство «Устройство с плоской иглой на двух сторонах». Игольчатые электроды ориентированы в направлении медиально-латерального направления пальца. Плоский электрод функционирует как заземляющий электрод, и стимулирующие токи могут течь от микроигольчатых электродов к плоскому электроду, то есть они могут проходить через пальцы, чтобы стимулировать не только тактильные рецепторы, расположенные в неглубоких областях, но также и в глубокие участки кожи. Таким образом, предлагаемый тактильный дисплей может отображать различные тактильные ощущения у испытуемых.Сначала опишем процесс изготовления устройства. Затем пороговые напряжения сравниваются с данными из предыдущей работы. Наконец, тактильные ощущения, которые могут быть представлены разработанным дисплеем, исследуются экспериментально, с особым акцентом на шероховатости. Управляющими параметрами дисплея являются частота импульсов и временные интервалы стимуляции между соседними электродами.
Проектирование и изготовление
2.1. Типовой проект дома
Электротактильный дисплей состоит из микроигл, которые проникают через роговой слой с высоким сопротивлением и электрически стимулируют тактильные рецепторы кожи.Длина микроигл была разработана таким образом, чтобы они проникали в часть рогового слоя, но не доходили до болевой точки. Толщина рогового слоя зависит от человека. Монтанья писал, что толщина эпидермиса кончиков пальцев, включая роговой слой, составляет примерно 600 мкм [21]. Хираяма опросил 50 японцев и обнаружил, что средняя толщина составляет 663 мкм (минимум: 600 мкм, максимум: 765 мкм) [22]. Учитывая, что нервы иннервируют область на 700 мкм ниже поверхности пальца [21], и что иглы не проникают полностью по его длине [23], мы решили, что микроиглы подходящей длины для проникновения в роговой слой и уменьшение импеданса составляет 600 мкм.
2.2. Изготовление
Сначала формируется массив титановых проволок. Для игл мы использовали титановую проволоку диаметром 0,3 мм (Nilaco Corp.) и полидиметилсилоксан (PDMS; SILPOT184, Dow Corning Toray) в качестве основы устройства. Оба материала биосовместимы. На рис. 2 (а) и 2 (б) показан процесс изготовления массива проводов. Мы механически обработали полиметилметакрилат (ПММА) и изготовили держатель для проволоки из двух частей. Верхняя часть имела толщину 0,5 мм и пять 0.Отверстия диаметром 31 мм в ряду, нижняя часть имела отступ 300 мкм. Начальная длина титановой проволоки контролировалась глубиной вдавливания. Две части PMMA были сложены и помещены в чашку Петри. Затем титановые проволоки сгибали и вставляли в отверстия держателя. Затем чашку Петри заполняли литейным раствором PDMS и обжигали на горячей плите при 65 ° C в течение 4 часов. Сформированную проволочную сетку окончательно вынули из чашки Петри и освободили от держателя.
Рис. 2. Процесс изготовления массива проводов.
a) Держатель проволоки из ПММА был изготовлен механическим способом. б) Титановые проволоки сгибали и помещали в отверстия держателя, а затем фиксировали с помощью PDMS. в) Форма иглы сформирована электрохимическим травлением. г) Фотография изготовленного устройства.
https://doi.org/10.1371/journal.pone.0148410.g002
Для заточки плоских концов проволок использовали электрохимическое травление [24–26]. Рис. 2 (c) показывает схематическое изображение этого процесса.Электролит для травления проволоки состоит из 4 г хлорида натрия и 60 мл раствора этиленгликоля. В нашей предыдущей работе [27, 28] мы обнаружили, что подходящее расстояние между проводами (со стороны анода) и катодным выводом составляло 20 мм. Мы подготовили прокладку из ПММА толщиной 20 мм и закрепили проволочную решетку и катодный вывод с обоих концов. Сетку проводов и распорку помещали в стакан, заполненный раствором электролита. При приложенном напряжении 30 В в течение 22 с были получены иглы длиной 600 мкм и радиусом 20 мкм на кончике.
Экспериментальные методы
3.1. Экспериментальная установка
Протокол эксперимента был одобрен Советом по биоэтике факультета науки и технологий Университета Кейо. Субъекты получили подробное объяснение экспериментальных методов, а затем подписали форму информированного согласия перед участием в исследовании. Устройство меняли для каждого испытуемого, иглы дезинфицировали в автоклаве, а поверхность пальца каждого испытуемого дезинфицировали этанолом перед экспериментами.Сначала испытуемого попросили отметить центр указательного пальца. После того, как игла была совмещена с отмеченной точкой, субъект осторожно надавил пальцем на устройство, пока игла не проникла в кожу пальца. Затем заземляющий электрод фиксировали к ногтю с помощью ленты. Игла на матрице и противоплоский электрод были подключены к функциональному генератору. Фотография тактильного дисплея, прикрепленного к пальцу, и схематическое изображение экспериментальной системы показаны на рис. 3 (а) и 3 (б).Двадцать субъектов (16 мужчин и 4 женщины; 21–25 лет) участвовали в экспериментах по пороговому напряжению и диапазону напряжения (разделы 3.2 и 3.3). Испытуемые 1–5, 7, 8, 10, 11, 14 и 16 (8 мужчин и 3 женщины) также участвовали в эксперименте по тестированию восприятия (раздел 3.4).
3.2. Пороговое напряжение
Мы экспериментально получили необходимые напряжения для демонстрации тактильных ощущений испытуемым с помощью устройства Two-Side Needle-Flat. После того, как игольчатые электроды и плоский электрод были прикреплены к пальцу испытуемого, на игольчатые электроды подавали электрический стимул, состоящий из положительных прямоугольных волн (рабочий цикл: 50%) с частотами 10, 20, 50 и 100 Гц.Для устройства с плоским электродом и устройства с односторонней иглой была активна только центральная игла, а остальные функционировали как заземляющие электроды, но для устройства с плоской двусторонней иглой активна была центральная игла, а плоский электрод на ногте. функционировал как заземляющий электрод. Приложенное напряжение увеличивалось с 0 В до тех пор, пока субъект не почувствовал тактильное ощущение, которое было записано как пороговое напряжение В th . Мы провели те же эксперименты с устройством с односторонней иглой и устройством с плоским электродом в качестве эталона.Эти устройства были изготовлены с использованием того же метода. Пороговые напряжения для трех различных устройств были измерены трижды для каждой частоты.
3.3. Диапазон напряжения
Пороговое напряжение В th — это минимальное напряжение, при котором субъект может воспринимать тактильную стимуляцию. По мере увеличения приложенного напряжения тактильная стимуляция усиливается и в конечном итоге становится болезненной. Мы называем это напряжение В боль .Напряжение, которое может быть приложено к объекту для отображения различных тактильных ощущений, ограничено диапазоном от В th до В боли . Предпочтительнее широкий диапазон или большая разница между V th и V pain ; однако диапазон обычно узкий, и из-за неоднородности импеданса кожи пальца V боль может варьироваться [28].Это ограничивает тактильные ощущения, которые могут быть представлены с помощью электротактильных дисплеев. Диапазон напряжения, В th до В pain , был экспериментально исследован для устройств с двусторонней иглой-плоской и односторонней иглой. Активный и заземляющий электроды были такими же, как и в эксперименте с пороговым напряжением. Используя устройство Two-Side Needle-Flat, мы также измерили напряжение, при котором испытуемые могут легко идентифицировать тактильные ощущения без боли. V th и V pain для двух устройств были измерены трижды для каждой частоты.
3.4. Тест восприятия
Мы попытались создать различные тактильные ощущения, контролируя частоту и пиковое напряжение приложенных напряжений, а также скорость потока стимуляции, то есть временную задержку между последовательным включением электродов, как показано на рис. 4. Положительный квадрат Импульсы генерировались генератором импульсов, а микроконтроллер Arduino MEGA управлял фото-МОП-реле для переключения активного электрода в назначенное время переключения.Сигнальный поток повторялся в направлении от медиального к латеральному направлению пальца. Мы провели тест восприятия, изменив частоту импульсов (10, 20, 50 и 100 Гц) и время переключения (с 30 мс до 100 мс). Каждого испытуемого попросили оценить воспринимаемую шероховатость по шкале от 1 (гладкая) до 6 (грубая). Тест восприятия проводился для каждой частоты пульса. Сначала стимуляции с самым медленным и самым быстрым временем переключения были представлены как стимулы, представляющие максимум и минимум шкалы, соответственно.Затем испытуемым случайным образом предъявляли ощущение каждого момента переключения. Электростимуляция применялась к кончикам пальцев испытуемых, пока они не смогли оценить шероховатость. Приложенное напряжение определялось испытуемыми таким образом, чтобы стимуляция была достаточно четкой, чтобы ее можно было оценить, но не болезненной. Этот эксперимент проводился один раз для каждого испытуемого.
Результаты и обсуждение
4.1. Пороговое напряжение
На рис. 5 показано пороговое напряжение устройства с плоским электродом, устройства с односторонней иглой и предлагаемого устройства с плоской иглой с двумя сторонами в зависимости от частоты импульсов.На рисунке показаны средние значения для 17 испытуемых. Трое из 20 испытуемых не чувствовали никаких ощущений при использовании игл, поэтому их результаты были исключены. Как правило, пороговое напряжение недавно предложенного устройства с плоской двусторонней иглой оказалось даже меньше, чем у предыдущего устройства с односторонней иглой, и намного меньше, чем у плоских электродов. Зависимый t-критерий был использован для оценки статистической значимости этой тенденции и показал, что различия в среднем пороговом напряжении между устройствами с плоским электродом ( M = 72.29, SD = 21,57) и устройство двусторонней иглы-плоской ( M = 11,15, SD = 10,81) для всего субъекта были статистически значимыми (t (16) = 9,82, p <0,05, d = 3,58). Таким же образом сравнивали среднее пороговое напряжение устройства с односторонней иглой ( M = 19,03, SD = 11,76) и устройства с плоской иглой с двумя сторонами. Результат зависимого t-теста показал, что различия в среднем пороговом напряжении этих двух устройств для всего субъекта были статистически значимыми (t (16) = 2.97, p <0,05, d = 0,70). Средняя разница в пороге между устройством с односторонней иглой и устройством с плоской иглой с двумя сторонами у испытуемых составила 7,88 В> 0 ( SD = 10,95), это также показывает, что устройство с плоской иглой с двух сторон требует меньшее напряжение, чем устройство с односторонней иглой. С помощью приведенного выше статистического анализа мы подтвердили, что пороговое напряжение недавно предложенного устройства с плоской двусторонней иглой было значительно меньше, чем у устройства с односторонней иглой. Затем результаты каждого испытуемого анализировались независимо с помощью зависимого t-критерия.Этот результат показал, что 12 испытуемых показали пороговое напряжение устройства с двухсторонней иглой, которое было значительно меньше, чем их пороговое напряжение устройства с односторонней иглой (p <0,05), 4 испытуемых показали пороговое напряжение устройства с двумя иглами. -Side Needle-Flat устройство, которое было значительно больше, чем их пороговое напряжение устройства с односторонней иглой (p <0,05), и 1 испытуемый не показали значительной разницы в пороговом напряжении между двумя устройствами. На рис.6 (а) показаны результаты для субъекта, у которого пороговое напряжение устройства с плоской иглой с двумя сторонами значительно меньше, чем у двух других устройств (p <0.05). На рис. 6 (b) показаны результаты для объекта, у которого пороговое напряжение устройства с плоской иглой с двумя сторонами больше, чем у устройства с односторонней иглой, и нет значительной разницы между устройством с плоским электродом и устройством с плоской иглой. Двухстороннее игольчатое устройство. На рис. 6 (c) показаны результаты для субъекта, у которого нет значительной тенденции между устройством с плоской двусторонней иглой и устройством с односторонней иглой. Пороговое напряжение варьировалось среди испытуемых из-за толщины рогового слоя, состояния кожи и, в частности, состояния введенных игл.Правильное введение игл является наиболее важным условием для существенного снижения порогового напряжения устройства «двусторонняя игла».
Рис. 5. Пороговое напряжение устройства с плоским электродом, устройства с односторонней иглой и недавно предложенного устройства с плоской иглой с двумя сторонами в зависимости от частоты импульсов.
Результаты показаны для 17 субъектов. Планки погрешностей представляют собой стандартные отклонения.
https://doi.org/10.1371/journal.pone.0148410.g005
Рис. 6. Результаты для трех испытуемых.
a) Статистически значимые результаты для одного испытуемого, p <0,05. б) Пороговое напряжение устройства с плоской иглой с двумя сторонами больше, чем у устройства с одной иглой, и разница в пороге между устройством с плоским электродом и устройством с плоской иглой с двумя сторонами не является статистически значимой. . c) Отсутствие существенной разницы в пороге между устройством с плоской двусторонней иглой и устройством с односторонней иглой.
https: // doi.org / 10.1371 / journal.pone.0148410.g006
Этот эксперимент показал, что недавно предложенное устройство с плоской иглой с двумя сторонами требует меньшего напряжения для создания тактильных ощущений. Меньшее напряжение, которое соответствует низкому энергопотреблению, имеет большое преимущество для носимых устройств. Мы считаем, что устройство Two-Side Needle-Flat может стимулировать тактильные рецепторы глубоко в коже пальца, располагая противозаземляющий электрод на ногте. Это подразумевалось тем фактом, что испытуемые испытывали тактильные ощущения с меньшим покалыванием.Пороговое напряжение не менялось в зависимости от частоты.
4.2. Диапазон напряжения
На рис. 7 показана разница между V th и V pain ; данные являются средними для 17 субъектов. Диапазон напряжения устройства с двусторонней иглой и плоской иглой был больше, чем у устройства с односторонней иглой. Зависимый t-критерий был использован для оценки этой тенденции и показал, что разница в диапазоне напряжений между устройством Two-Side Needle-Flat ( M = 21.37, SD = 7,77), а устройство с односторонней иглой ( M = 14,05, SD = 9,67) было статистически значимым для всего субъекта (t (16) = 2,99, p <0,01, d = .83). Средняя разница между диапазоном напряжения устройства с плоской иглой с двумя сторонами и диапазоном напряжения устройства с односторонней иглой составляла 7,31 В, а стандартное отклонение составляло 9,78 для испытуемых. Эти результаты показывают, что диапазон напряжения устройства с двусторонней иглой значительно шире, чем у устройства с односторонней иглой.Затем был проведен статистический анализ результатов по каждому предмету. Результат зависимого t-теста показал, что 10 испытуемых продемонстрировали диапазон напряжения устройства с плоской двусторонней иглой, который был значительно шире, чем у устройства с односторонней иглой (p <0,05), 6 испытуемых не показали значимого разница в диапазоне напряжений между двумя устройствами, и 1 испытуемый показал диапазон напряжения устройства с двусторонней иглой и плоской иглой, который был уже, чем у устройства с односторонней иглой (p <.05). Узкий диапазон устройства с односторонней иглой привел к ограниченному разнообразию тактильных ощущений. Кроме того, пациенты с большей вероятностью почувствовали боль при использовании устройства с односторонней иглой. Было подтверждено, что новое предложенное устройство с заземляющим электродом на ногте имеет более широкий диапазон напряжений, что расширяет диапазон экспериментов с тактильным отображением, которые можно проводить.
Рис. 7. Разница между пороговым напряжением и болезненным напряжением для устройств с односторонней иглой и двусторонней иглой-плоской по отношению к частоте.
Планки погрешностей представляют собой стандартные отклонения. Показаны результаты для 17 человек. Диапазон не менялся с частотой, но устройство Two-Side Needle-Flat имело более широкий диапазон.
https://doi.org/10.1371/journal.pone.0148410.g007
На рис.8 показана взаимосвязь между пороговым напряжением В th болезненным напряжением В болью и комфортным напряжение устройства Two-Side Needle-Flat; данные являются средними для 17 субъектов.Значение комфортного напряжения было примерно посередине между V th и V pain . Большой запас для достижения болезненного напряжения позволяет стабильно проявлять тактильные ощущения без риска возникновения боли из-за внезапного изменения состояния кожи.
4.3. Тест восприятия
На рис. 9 показаны результаты тестов восприятия. Блоки оттенков серого на рис. 9 (а) соответствуют средним значениям оценок шероховатости для 11 субъектов (1 = белый и 6 = черный) в отношении времени и частоты переключения.Тенденция ясно показывает, что шероховатость увеличивается со временем переключения, поскольку блоки темнеют к верхней части диаграммы. Для подтверждения этой тенденции был проведен корреляционный анализ. Средняя грубость суждений по испытуемым и время переключения имеют положительную корреляцию (r = 0,993, p <0,01). Частота не является доминирующим фактором. Этот результат подтвердил, что мы можем отображать различные ощущения, изменяя время переключения.
Рис. 9. Результаты теста восприятия.
a) Блоки в градациях серого соответствуют средним значениям шероховатости, о которых сообщили 11 испытуемых. б) Средние значения оценок грубости (усредненные по частотам) для 11 испытуемых. Планки погрешностей представляют собой стандартные отклонения.
https://doi.org/10.1371/journal.pone.0148410.g009
После тестов восприятия мы попросили испытуемых заполнить анкету об ощущениях, которые они воспринимали. На рис. 10 показаны вопросы анкеты и ответы 11 испытуемых.Мы также призвали испытуемых оставлять отзывы по каждому вопросу. Замечания испытуемых показали, что они признали, что ощущения менялись со временем переключения, но представленные ощущения не были такими же, как настоящие грубые или гладкие ощущения. Ощущение было скорее «медленным-быстрым покалыванием» или «щекоткой», чем настоящим ощущением «грубо-гладкого» для некоторых испытуемых. Большинство испытуемых сообщили, что отсутствие движения пальца мешает им чувствовать, что они касаются чего-то, и что «гладкое» ощущение может быть ближе к реальному, чем «грубое» ощущение, но ощущение, представленное пять игл было слишком коротким, чтобы распознать его идеально.Это одна из причин, почему оценка за вопрос 3 находится в середине оценки. Чтобы создать ощущение, будто объекты касаются реальной поверхности, потребуется другая система с несколькими рядами игл, покрывающих большую площадь пальца. Мы также обнаружили, что необходимо равномерное введение пяти игл для точного восприятия разницы в ощущениях при каждом переключении. Когда одна игла обеспечивала более сильную стимуляцию, чем другие иглы, испытуемым было трудно правильно оценить шероховатость.Дальнейшее изучение и улучшение системы необходимы, чтобы представить реальное восприятие шероховатости; однако мы успешно представили различные ощущения с помощью нашего нового устройства.
Выводы
Был предложен и продемонстрирован электротактильный дисплей с микроигольчатыми электродами на кончике пальца и противо-плоским электродом на ногте. Устройство способно стимулировать тактильные рецепторы, расположенные как в глубоких, так и в неглубоких областях кожи, что позволяет снизить пороговое напряжение для демонстрации тактильных ощущений субъектам.Более того, было экспериментально подтверждено, что разница между пороговым напряжением и болезненным напряжением была больше для нового устройства по сравнению с предыдущим устройством, что допускает большее изменение стимулирующих сигналов и, следовательно, тактильное ощущение. Новое устройство могло успешно контролировать шероховатость представленных тактильных ощущений, последовательно активируя отдельные электроды. Предложенный электротактильный дисплей выгоден с точки зрения низкого энергопотребления, легкого веса и гибкости и легко применим к инновационным технологиям передачи информации с использованием тактильной стимуляции.
Благодарности
Эта работа была поддержана Preursory Research for Embryonic Science and Technology (PRESTO, Information Environment and Human), Японское агентство науки и технологий.
Вклад авторов
Задумал и спроектировал эксперименты: МТ НК НМ. Проведены эксперименты: МТ НК КТ. Проанализированы данные: МТ НК. Внесенные реактивы / материалы / инструменты анализа: МТ НК КТ НМ. Написал статью: МТ НК НМ.
Ссылки
- 1.Сринивассан М.А., Дандекар К. Исследование механики тактильного ощущения с использованием двумерных моделей кончика пальца приматов. Пер. ASME, J. Biomech. Англ. 1996; 118: 48–55.
- 2. Johansson RS. Тактильная чувствительность в руке человека: характеристики восприимчивого поля механорецептивных единиц в области голой кожи. J. Physiol. 1978; 281: 101–112. pmid: 702358
- 3. Валлбо А.Б., Йоханссон Р.С. Свойства кожных механорецепторов в руке человека, связанные с ощущением прикосновения.Гм. Neurobiol. 1984; 3: 3–14. pmid: 6330008
- 4. Чжан Ю., Мики Н. Оптимальная конструкция эпидермальных гребней тактильного датчика для повышения чувствительности при обнаружении силы сдвига. Транзакции IEEJ по датчикам и микромашинам. 2011; 131 (4): 141–147.
- 5. Чжан Ю., Мики Н. Повышение чувствительности микромасштабного биомиметического тактильного сенсора с эпидермальными гребнями. J. Micromech. Microeng. 2010; 20: 085012 (7pp).
- 6. Ян TH, Ким SY, Ким CH, Квон Д.С., Книга WJ.Разработка миниатюрного тактильного модуля с использованием упругой и электромагнитной силы для мобильных устройств. Proc. Eurohaptics 2009. 2009; 13–17.
- 7. Ватанабэ Т., Фукуи С. Метод контроля тактильного ощущения шероховатости поверхности с помощью ультразвуковой вибрации. IEEE Int. Конф. Роб. Автомат. 1995. 1995; 1134–1139.
- 8. Бьет М., Жиро Ф., Лемер-Семил Б. Эффект сжимающей пленки для дизайна ультразвуковой тактильной пластины. IEEE Trans. Ультразвуковой. Англ.Ферроэлектр. Freq. Контроль. 2007; 54: 2678–2688.
- 9. Хоши Т., Такахаши М., Ивамото Т., Шинода Х. Бесконтактный тактильный дисплей, основанный на радиационном давлении воздушного ультразвука. IEEE Trans. Тактильные ощущения июль-сентябрь. 2010; 155–165.
- 10. Исии Т., Хида Н., Ямамото А., Хигучи Т. Электростатический тактильный дисплей с использованием тонкопленочного слайдера. 6-й Int. Конф. Контроль движения и вибрации. 2002; 547–552.
- 11. Jungmann M, Schlaak HF Миниатюрный электростатический тактильный дисплей с высокой структурной податливостью.Proc. Eurohaptics 2002. 2002; 12–17.
- 12. Arouette X, Matsumoto Y, Ninomiya T., Okayama Y, Miki N. Динамические характеристики гидравлического усилителя для систем приводов большого смещения. Датчики. 2010; 10: 2946–2956. pmid: 22319281
- 13. Косемура Ю., Исикава Х., Ватанабэ Дж., Мики Н. Характеристика поверхностей, виртуально созданных с помощью тактильного дисплея МЭМС. Jpn. J. Appl. Phys. 2014; 53: 06JM11.
- 14. Кадзимото Х., Инами М., Каваками Н., Тачи С.Умное сенсорное увеличение чувствительности кожи с помощью электрокожного дисплея. В Proc. 11-го симпозиума по тактильным интерфейсам для виртуальной среды. и Teleoperator Systems, Лос-Анджелес. 2003. https://doi.org/10.1109/HAPTIC.2003.1191225
- 15. Кадзимото Х., Каваками Н., Маэда Т., Тачи С. Отображение тактильных ощущений с использованием функциональной электрической стимуляции. В Proc. 9-го Междунар. Конф. по искусственной реальности и телексистенции. 1999; 107–114.
- 16. Кадзимото Х., Каваками Н., Тачи С.Оптимальный метод проектирования для селективной стимуляции нервов и его применение для электрокожной индикации. В Proc. 10-го симпозиума по тактильным интерфейсам для виртуальной среды и телеоператорских систем, Орландо. 2002; 303–310. https://doi.org/10.1109/HAPTIC.2002.998973
- 17. Кадзимото Х., Каваками Н., Тачи С. Психофизическая оценка избирательности рецепторов в электро-тактильном отображении. В Proc. 13-го Международного симпозиума по измерениям и контролю в робототехнике (ISMCR). 2003; 83–86.
- 18. Кадзимото Х., Каваками Н., Тачи С. Умное прикосновение: электрическая кожа для прикосновения к неприкасаемым. IEEE Comput. График. Прил. 2004; 24: 36–43.
- 19. Кадзимото Х., Каваками Н., Маэда Т., Тачи С. Электрокожный дисплей как интерфейс к виртуальному тактильному миру. Виртуальная реальность IEEE. 2001. 2001; 289–290.
- 20. Китамура Н., Чим Дж., Мики Н. Электротактильный дисплей с использованием микропроцессорного набора игл. J. Micromech. Microeng. 2015; 25 (2).
- 21. Montagna W, Lobitz WC. Эпидермис. 1-е изд. Нью-Йорк: Academic Press; 1964.
- 22. Хираяма Х. Гистологическая конфигурация кожи японца, в частности изучение измерений. J. Med. Доц. компании Nippon Med. Школа. 1961; 28: 81–96 (на японском языке).
- 23. Мартанто М., Мур С.Дж., Коуз Т., Праусниц Р.М. Механизм введения жидкости при введении и втягивании микроиглы. J. Control Release. 2006; 112: 357–361. pmid: 16626836
- 24.Ju BF, Chen YL, Ge Y. Искусство электрохимического травления для изготовления вольфрамовых зондов с регулируемым профилем наконечника и характеристическими параметрами. Rev. Sci. Instrum. 2011; 82: 013707. pmid: 21280837
- 25. Дегучи Т. Электролитическая обработка травлением растворами этиленгликоля. J. Общество отделки поверхностей Японии. 2010; 61: 305–306.
- 26. Накагава Х., Йошимото Н., Эгашира М., Муранака Т., Хиронака М., Морита М. Электрополировка титана в растворах электролитов на основе смешанных растворителей этанола и этиленгликоля.J. Общество отделки поверхностей Японии. 2010; 61: 58–62.
- 27. Китамура Н., Чим Дж., Мики Н. Влияние формы иглы на работу электро тактильного дисплея игольчатого типа. MEMS’14: 27-я Международная конференция IEEE Int. Конф. Micro Electro Mech. Syst. 2014; 1183–1184.
- 28. Китамура Н., Чим Дж., Мики Н. Массив микроигольчатых электродов для электро тактильного дисплея. Transducers ‘13: 17th IEEE Int. Конф. Solid-State Sens., Актуаторы Microsyst. 2013; 106–107.
Как мозг обрабатывает тактильные ощущения: новые открытия — ScienceDaily
Традиционное понимание в нейробиологии состоит в том, что тактильные ощущения от кожи собираются только для формирования полноценного опыта в коре головного мозга, наиболее продвинутой части мозга.Однако это оспаривается новыми результатами исследования Лундского университета в Швеции, которые предполагают, что как другие уровни мозга играют большую роль, чем считалось ранее, так и что большая часть различных структур мозга участвует в восприятии прикосновения.
«Считалось, что тактильное ощущение, такое как прикосновение к простому объекту, активирует только очень небольшую часть коры головного мозга. Однако наши открытия показывают, что, вероятно, активируется гораздо большая часть.Сборка ощущений фактически начинается в стволе мозга «, — сказал исследователь нейробиологии Хенрик Йорнтелл из Лундского университета.
По словам его коллеги Фредрика Бенгтссона, который также участвовал в исследовании, это первое исследование, показывающее, как сложные тактильные ощущения от кожи кодируются на клеточном уровне в головном мозге.
«Наши открытия дали нам новый ключ к пониманию того, как восприятие прикосновения к коже обрабатывается и передается в мозг», — сказал он.
Исследователи из Лунда работали в сотрудничестве с исследователями из Парижа, чтобы изучить, как отдельные нервные клетки получают информацию от кожи. Они использовали «тактильный интерфейс», который создавал контролируемые ощущения перекатывания и скольжения, а также начала и прекращения контакта. Движения оказались решающими для восприятия осязания — то, что ранее было технически невозможно изучить.
Результаты шведско-французской исследовательской группы были опубликованы в известном журнале Neuron .Работа основана на экспериментах на животных и является, прежде всего, фундаментальным исследованием, направленным на расширение знаний о функциях мозга. Однако есть и возможные области применения.
«Нормальные протезы кисти и руки не дают никакой обратной связи и, следовательно, не дают ощущения, что они« настоящая »рука или рука. Однако есть новые усовершенствованные протезы с датчиками, которые могут передавать информацию об ампутированной руке. Наши исследования могут внести свой вклад в наши исследования. дальнейшее развитие таких датчиков «, — сказал Хенрик Йорнтелл.
Новые открытия могут также иметь отношение к психическим заболеваниям и заболеваниям мозга, таким как инсульт и болезнь Паркинсона. Детальное знание того, как мозг и его различные части обрабатывают информацию и создают картину тактильного опыта, важно для понимания этих условий.
«Если мы знаем, как работает здоровый мозг, мы можем сравнить его с ситуацией при различных заболеваниях. Тогда, возможно, мы сможем помочь мозгу пациентов функционировать более нормально», — сказал Хенрик Йорнтелл.
История Источник:
Материалы предоставлены Лундским университетом . Примечание. Содержимое можно редактировать по стилю и длине.
механизмов тактильного ощущения | Лаборатории коммуникационных наук NTT
Люди воспринимают такие материальные свойства предметов, как шероховатость, твердость и температуру на ощупь, и оценивают их как удобные или неудобные. Затем тактильные ощущения выражаются и передаются другим языком.Цель нашего исследования — понять механизмы обработки тактильной информации с многоуровневых точек зрения, а именно: от того, как физические стимулы воспринимаются тактильными рецепторами, до того, как кодируются нейронные сигналы, как формируются эмоциональные суждения и как ощущения выражаются устно. Благодаря результатам наших исследований мы надеемся разработать новые технологии тактильного представления информации и практические приложения для более глубокого общения.
В последние годы тактильное представление информации стало применяться в мобильных терминалах и игровых устройствах.Понимание того, как люди обрабатывают тактильную информацию, важно для развития технологий тактильного представления информации. Кроме того, поскольку тактильные ощущения глубоко связаны с чувством комфорта, привязанности и эмоциями, тактильные ощущения можно использовать не только для представления информации, но и для достижения более тесного общения, которое объединяет людей.
Точно так же, как глаза имеют разные ячейки для кодирования цветов (красный, зеленый и синий), наша кожа имеет различные датчики для обнаружения вибраций, температуры и другой информации.Мы используем психологические методы, чтобы изучить, как эти нейронные сигналы обрабатываются в человеческом мозге.
Иллюзии — это явления, при которых существует несоответствие между тем, что наш мозг воспринимает, и тем, что существует на самом деле. Они дают важные подсказки, проливающие свет на то, как нейронные органы обрабатывают тактильную информацию. Кроме того, иллюзии резко улучшили возможности устройств представления информации. Мы проводим исследования тактильных иллюзий, таких как иллюзия тактильной непрерывности (см. Справа (1)) и иллюзия теплового направления (см. Справа (2)).
Тактильные ощущения глубоко связаны с предпочтениями, комфортом и другими сенсорными суждениями. Мы также проводим исследования, чтобы выяснить взаимосвязь тактильных ощущений и эмоций.
Анализ слов — это средство психологического изучения категорий ощущений. Мы сосредоточились на звукоподражаниях (общий термин для миметических слов) и создали двумерную карту распределения звукоподражаний на основе их впечатлений. Карта позволила нам визуализировать взаимосвязь категорий в контакте.
Термоупругие эффекты, индуцированные лазером, могут вызывать тактильные ощущения
Взаимодействие лазера с веществом и его применение во многих областях широко исследовались с момента разработки рубинового лазера в 1960 году, что позволило найти множество мощных приложений, таких как термоядерный синтез. , лазерный отжиг, нелинейная оптика и абляция и коагуляция тканей в медицине, а также приложения с низким энергопотреблением, такие как оптоволоконная связь и спектроскопия. До сих пор было известно, что механический аспект взаимодействия лазера с веществом связан с генерацией волн напряжения (или акустических) на основе пяти основных механизмов взаимодействия: пробоя диэлектрика, испарения или абляции, термоупругих процессов, электрострикции и радиационного давления.В режиме линейного взаимодействия с излучением малой мощности, имеющим короткую длительность импульса в несколько наносекунд или меньше, термоупругий процесс является доминирующим, особенно при взаимодействии с биологической средой, такой как ткань 5,6,7,8 . Когда лазерный луч облучает ткань, падающий свет обеспечивает распределение световой энергии в ткани падающим светом в соответствии с оптическими свойствами кожи, такими как коэффициент поглощения, коэффициент рассеяния и показатель преломления. Энергия падающего света затем преобразуется в тепловую энергию, отражающую тепловые свойства ткани, такие как проводимость, теплоемкость, коэффициенты конвекции и излучательная способность, а температура в ткани увеличивается с последующей теплопередачей к окружающим тканям.В этом случае используются два типа фотоэффектов в зависимости от уровня энергии и скорости увеличения температуры: фототермический эффект и фотомеханический эффект. При фототермическом эффекте тепловая энергия накапливается достаточно, чтобы вызвать коагуляцию или абляцию ткани с испарением и пиролизом. С другой стороны, в случае фотомеханического эффекта мгновенный нагрев ткани из-за поглощения энергии импульсным лазерным излучением вызывает быстрое тепловое расширение нагретого объема в ткани и создает термоупругие волны, когда нагретый объем переконфигурируется в новое состояние равновесия.Термоупругие волны появляются в виде переходной формы волны и распространяются в ткани со скоростью звука ~ 1,5 км / с, вызывая механическое смещение в ткани и тем самым обеспечивая возможность активации механорецепторов. Следует заметить, что именно напряжение (или, что то же самое, смещение), а не стресс, непосредственно вызывает физические ощущения, если таковые имеются.
На рис. 1а представлена схематическая диаграмма экспериментальной установки для обнаружения механического воздействия лазера на образец кожи трупа, оптические и механические характеристики которого во многом аналогичны характеристикам in vivo кожи человека.Использовался лазер с модулируемой добротностью с удвоенной частотой при длине волны 532 нм и длительности импульса 5 нс. Образец кожи трупа прикрепляли к передней стороне преобразователя из поливинилиденфторида (ПВДФ). Диаметр пятна был установлен равным 0,48 мм. Для проверки энергетической зависимости механического воздействия, индуцированного лазером, импульсный лазер облучали энергией луча от 0,12 до 1,90 мДж, что было ниже уровня максимально допустимого воздействия (МПЭ) 20 мДж / см 2 при усреднении по ограничивающая апертура 3.Диаметр 5 мм, обеспечивающий безопасность воздействия на кожу лазерного излучения. Затем было проведено гистологическое исследование, чтобы убедиться, что механическое воздействие лазерного излучения не было вторичным явлением, вызванным повреждением кожи трупа. Окрашенные срезы показали типичные морфологические особенности нормальной тонкой кожи как контрольной, так и подвергнутой лазерному облучению кожи трупа (дополнительный рисунок 1).
Рис. 1Физические эксперименты: Лазерное облучение образца кожи трупа.
а . Принципиальная схема экспериментальной установки для обнаружения механического воздействия лазера на образец кожи трупа. Импульсный лазер с модуляцией добротности с удвоенной частотой (ширина импульса 5 нс) использовался для генерации однократного лазерного луча на длине волны 532 нм. Сгенерированный луч был настроен для фокусировки на образце кожи через оптический фильтр и линзу. Размер пятна луча на образце кожи составлял 0,48 мм. Образец кожи трупа прикрепляли к передней стороне преобразователя из ПВДФ.В эксперименте использовались восемь различных энергий пучка в диапазоне от 0,12 до 1,90 мДж, оставаясь ниже уровня MPE, чтобы гарантировать отсутствие биологического повреждения образца кожи. б . Временные ряды выходных сигналов датчика преобразователя PVDF, записанные от 20 мс до до 400 мс после стимуляции, представлены в виде напряжения [В] по левой вертикальной оси и давления [МПа] по правой вертикальной оси, соответственно. Сложные структуры механических волн последовательно наблюдались для восьми различных уровней энергии пучка.Первые отрицательные пики (~ 5 мс после стимуляции) были вызваны волнами напряжения, приходящими на датчик. Последующие сложные формы сигналов были связаны с динамикой датчика и измерительной установки. с . Значения давления, измеренные на первых отрицательных пиках, генерируемых различными уровнями энергии пучка. Белые кружки обозначают средние значения давления, а вертикальные полосы обозначают стандартное отклонение. Максимальные давления составляли 0,68 ± 0,02 МПа, создаваемые пучком максимальной энергии (1.90 мДж). Значения давления линейно коррелировали с уровнями энергии пучка ( r 2 = 0,9969, наклон модели линейной регрессии = 0,35 МПа / мДж). (Рис. 1 был получен из Университета Конкук, нарисован с помощью программного обеспечения MATLAB и MS Power Point и создан Джэ-Хун Джун).
На рис. 1b среднее значение записанных во времени выходных сигналов представлено в виде напряжения [В] по левой вертикальной оси и давления [МПа] по правой вертикальной оси, соответственно. Сложная волновая картина механических волн постоянно возникала при изменении энергии луча.Передние отрицательные пики создавались волнами напряжения, приходящими сначала на датчик, а последующие сложные формы сигналов были связаны с динамикой датчика и измерительной установки. Максимальные давления наблюдались при максимальной энергии пучка (1,90 мДж). На рис. 1в нанесено давление, создаваемое деформацией, и его максимальное значение составило 0,68 ± 0,02 МПа. Между давлением и энергией пучка существует линейная зависимость с крутизной 0,35 МПа / мДж. В заключение подтверждается, что механический эффект создается эффективно, когда импульсный лазер облучает образец кожи трупа малой мощностью, варьирующейся в зависимости от уровня MPE.Хотя этот эксперимент in vitro с кожей трупа имел граничные условия, отличные от эксперимента in vivo с кожей человека , он давал возможность вызвать тактильные ощущения в коже, обнаруживая волны напряжения из-за термоупругих эффектов в коже трупа, чьи основные компонент представляет собой коллаген, как в коже человека in vivo .
Инфракрасное изображение
in vivo кожи человекаПоскольку быстрое тепловое расширение тесно связано с деформацией кожи, оценка изменений температуры кожи человека может отражать возникновение термоупругих эффектов.Таким образом, мы стремились показать in vivo мгновенное и относительно небольшое повышение температуры в случае термоупругих эффектов без теплового повреждения кожи. Мы измерили индуцированное лазером изменение температуры на поверхности указательного пальца с помощью инфракрасной (ИК) камеры.
График на рис. 2а показывает временные изменения температуры в пятне луча в ответ на лазерную стимуляцию с энергией 1,90 мДж и длительностью импульса 5 нс. ИК-изображение велось от 0.От 05 с до стимуляции до 1,5 с после стимуляции с частотой кадров 400 Гц. Пространственное разрешение ИК-изображений составляло 0,14 × 0,14 мм 2 . Временной профиль продемонстрировал, что поглощение энергии в начале лазерной стимуляции привело к мгновенному увеличению температуры на 1,63 ° C. Затем температура экспоненциально снижалась со временем с постоянной времени 60 мс, возвращаясь в исходное состояние. Наблюдаемая постоянная времени (60 мс) была на одном уровне с теоретически ожидаемой постоянной времени (порядка 100 мс) в механизме термодиффузии.Изменение температуры, наблюдаемое в эксперименте in vivo , было на 0,87 ° C ниже, чем в моделировании, что может быть связано с ограничениями пространственного и временного разрешения ИК-камеры, а также с индивидуальными вариациями оптических коэффициентов.
Рис. 2Измерения температуры кожи in vivo: индуцированные лазером изменения температуры на поверхности кожи человека, измеренные с помощью ИК-камеры.
а. Временные изменения температуры в пятне луча указательного пальца, отсчитываемое от 0.От 05 с до до 1,5 с после лазерной стимуляции. Использовался тот же лазер, что и на рис. 1, импульсный лазер с модуляцией добротности с удвоенной частотой, длиной волны 532 нм и длительностью импульса 5 нс. ИК-изображения, полученные за 0,05 с до стимула, начала стимула и 1,5 с после стимула, показаны в правом верхнем углу графика слева направо. Пространственное разрешение ИК-изображений составляло 0,14 × 0,14 мм 2 . Временное разрешение или частота кадров составляли 400 Гц. Максимальное повышение температуры составило 1.63 ° С. г. Пространственное распределение температуры в окрестности пятна луча в условиях in vivo . Были предоставлены как двухмерный контур (верхний ряд), так и трехмерные графики (нижний ряд) пространственного распределения температуры. Первый и второй столбцы представляют собой пространственные распределения температуры до и после лазерной стимуляции соответственно. Последний столбец показывает пространственное распределение изменения температуры (Δ T ), полученное вычитанием первого столбца из второго столбца.(Рис. 2 был получен из Университета Конкук, нарисован программой MATLAB и создан Jae-Hoon Jun)
На рис. 2b показано пространственное распределение температуры около пятна луча на указательном пальце, распределенное вокруг пятна луча. Для лучшего представления были предоставлены как двумерный контур, так и трехмерные графики пространственного распределения температуры. Первый и второй столбцы представляют собой пространственные распределения температуры до и после лазерной стимуляции соответственно. Последний столбец показывает пространственное распределение изменения температуры (ΔT), которое было получено вычитанием первого столбца из второго столбца.Эффективный диаметр нагретой области был оценен как ~ 0,59 мм на уровне 1 / e путем усреднения значений, определенных в четырех различных направлениях, что было сопоставимо с результатом моделирования методом Монте-Карло с учетом эффектов рассеяния, т. Е. 0,55 мм, приведено в следующем разделе (рис. 3б).
Рис. 3 Результаты моделированияМонте-Карло:
Распределения плотности потока энергии ( a ) и повышения температуры ( b ) в коже. а. Распределение плотности потока энергии в коже, полученное в результате моделирования методом Монте-Карло при мощности падающего лазера 1 Вт. Предполагалось, что пространственный профиль падающего света соответствует распределению Гаусса с диаметром 1/ e 0,48 мм. г. Распределение повышения температуры кожи, рассчитанное с энергией импульса 1,90 мДж. Предполагалось, что кожа состоит из двух слоев (эпидермиса и дермы). Максимальное повышение температуры составило ~ 2,5 ° C, а эффективный диаметр на уровне 1/ e был ~ 0.55 мм. (Рис. 3 был получен из Университета Чосун, отрисован программным обеспечением MATLAB и создан Jong-Rak Park)
В итоге in vivo результаты подтверждают возможное генерирование деформационных волн из-за термоупругих эффектов лазерной стимуляции, показывая быстрое увеличивает температуру кожи человека на 1,63 ° C с помощью лазерного воздействия с длительностью импульса 5 нс и энергией 1,90 мДж. Более желательным решением для проверки волн деформации, генерируемых лазерными стимулами, могло бы быть прямое измерение физического смещения кожи человека in vivo , e.g., используя оптический микроскоп или интерферометр. Из моделирования, приведенного в следующем разделе, ожидается, что повышение температуры на ~ 2 ° C вызовет смещение кожи человека порядка нескольких сотен нанометров. В этом случае оптический микроскоп недоступен с точки зрения пространственного разрешения, тогда как интерферометр, позволяющий измерять смещения в наномасштабе, можно рассматривать как хорошую альтернативу. Однако на практике также трудно использовать интерферометр для измерения такого небольшого смещения кожи человека in vivo , так как этому может существенно помешать непроизвольное движение тела, которое может вызвать неожиданное смещение.Поэтому вместо этого мы оценили возможное смещение кожи человека из-за лазерной стимуляции, используя моделирование методом Монте-Карло и последующее моделирование термоупругого волнового уравнения, которое будет описано в следующем разделе.
Моделирование индуцированных лазером термоупругих эффектов в коже человека
Мы также выполнили моделирование методом Монте-Карло, чтобы должным образом учесть характеристики переноса и поглощения света в коже человека. Для моделирования предполагалось, что кожа состоит из двух слоев: эпидермиса и дермы.Толщина эпидермиса была установлена равной 100 мкм, что является средним значением толщины эпидермиса, о котором сообщалось в предыдущем исследовании с использованием оптической когерентной томографии 9 . Длина волны и пространственный профиль были приняты равными 532 нм и гауссову с диаметром 1/ e , равным 0,48 мм, соответственно. Те же настройки параметров, включая энергию импульса, используемую для расчета повышения температуры, описанного вкратце, также были применены для изучения реакции мозга на лазерную стимуляцию с использованием экспериментов с ЭЭГ человека, которые будут обсуждаться позже.
На рис. 3a показано распределение плотности потока энергии в коже, полученное в результате моделирования методом Монте-Карло, когда мощность падающего лазера составляла 1 Вт. На основе этого результата распределение повышения температуры (см. Рис. 3b) также было рассчитано в соответствии с 10.
где W — это распределение плотности поглощенной энергии, ρ — массовая плотность и C — удельная теплоемкость. Энергия в импульсе падающего света принималась равной 1,90 мДж. Оптические и физические свойства кожи человека были взяты из недавно опубликованной литературы 11,12 и подробно представлены в разделе методов.Из-за разницы в коэффициентах поглощения между слоями эпидермиса и дермы распределение температуры показало резкое изменение на границе между двумя слоями. Максимальное повышение температуры у поверхности кожи составило ~ 2,5 ° C. Эффективный диаметр на уровне 1/ e составил ~ 0,55 мм.
Затем мы смоделировали термоупругие эффекты, вызванные импульсным лазером на коже человека, путем численного интегрирования термоупругого волнового уравнения 13,14 , которое было обобщено в разделе «Метод», для распределения температуры, полученного в результате моделирования методом Монте-Карло.Предполагалось, что температура линейно возрастает в течение длительности лазерного импульса (т.е. 5 нс). Предполагая симметрию в радиальном направлении, были приняты цилиндрические координаты, где оси z и r представляют направление в кожу (осевое направление) и радиальное направление, соответственно. На рис. 4а, б показаны результаты моделирования осевой ( u z ) и радиальной ( u r ) компонент вектора смещения u , который полностью определяет деформацию кожи как функция времени.Пространственное распределение u z и u r было представлено в пять различных моментов времени (100 нс, 200 нс, 300 нс, 400 нс и 10000 нс) после падения лазерного импульса. . Было видно, что u z и u r постепенно накапливаются в значительной степени вблизи поверхности кожи, а их части распространяются в кожу. Фактически, было известно, что решение термоупругого волнового уравнения делится на две группы: временное нестационарное решение и не зависящее от времени квазистационарное решение 15 .Переходное решение распространяется со скоростью звука и в конечном итоге исчезает в области вблизи поверхности кожи. Напротив, квазистационарный раствор появляется около поверхности кожи после того, как переходный раствор затухает. Согласно нашему моделированию, было замечено, что амплитуда переходного раствора достигала максимума между 200 нс и 300 нс, а затем продолжала уменьшаться во время прохождения через кожу. Поскольку квазистационарное решение вызвано неравномерным распределением температуры, оно также постепенно исчезает с термодиффузией 15 .Мы не обнаружили существенного изменения после 10 000 нс в области 1 мм (аксиальный) × 1 мм (радиальный). Максимальные амплитуды переходного решения составили ~ 85 нм для u z и ~ 40 нм для u r соответственно, тогда как для u z они составили ~ 230 нм. и ~ 90 нм для квазистационарного решения соответственно.
Рисунок 4Результаты моделирования термоупругого волнового уравнения:
Осевое смещение u z ( a ) и радиальное смещение u r 3 () при 5 различных b моменты времени (100 нс, 200 нс, 300 нс, 400 нс и 10000 нс) после падения лазерного импульса длительностью 5 нс. а. Максимальные амплитуды осевого смещения составляли ~ 85 нм для переходных волн и ~ 230 нм для квазистационарных решений соответственно. Положительные значения указывают на смещение в коже, а отрицательные — на воздух. г. Максимальные амплитуды радиального смещения составляли ~ 40 нм для переходных волн и ~ 90 нм для квазистационарных решений соответственно. В обоих случаях переходные волны распространяются в кожу со скоростью звука с уменьшающейся амплитудой, и квазистационарное состояние достигается при 10 000 нс в области 1000 мкм (аксиальная) × 1000 мкм (радиальная) под поверхностью кожи.(Рис. 4 был получен из Университета Чосун, нарисован программой MATLAB и создан Jong-Rak Park)
Поскольку термоупругие волны имеют пространственную протяженность порядка размера нагретой области и распространяются со скоростью звука, временная длительность τ str , в течение которой переходные термоупругие волны продолжают существовать в определенной области кожи, задается формулой 10
, где d — характерная длина нагретой области, а c — скорость звука в коже (≈ 1540 м / с).τ str также известно как время удержания напряжения. Из-за большего коэффициента поглощения слоя эпидермиса d можно принять за толщину слоя эпидермиса, т.е. ~ 100 мкм. В этом случае τ str = 65 нс. С другой стороны, характерный временной масштаб распада квазистационарного раствора, который сравним со временем термодиффузии, можно оценить как 16
, где κ — коэффициент температуропроводности.Для типичного значения κ (= 0,15 мм 2 / с) для биологической ткани 17 , τ d = 67 мс согласно формуле. (3). Это характерное время составляет порядка 100 мс. Хотя амплитуды переходного решения меньше, чем амплитуды квазистационарного решения, а τ str намного меньше, чем τ d , вероятно, что переходные термоупругие волны играют главную роль в сенсорно вызванных реакция, вызывая внезапный механический взрыв, который может активировать все сенсорные рецепторы около поверхности кожи почти одновременно с помощью их уникальных динамических характеристик.
Эксперименты по поведенческой и электроэнцефалографии (ЭЭГ)
Наконец, было продемонстрировано сходство между механической и лазерной стимуляцией с точки зрения поведенческих и корковых реакций у людей. Что касается корковых ответов, мы сосредоточились на характеристиках корковой активности, которые можно неинвазивно измерить с помощью ЭЭГ или магнитоэнцефалографии (МЭГ), и были исследованы для понимания того, как соматосенсорная информация обрабатывается в головном мозге 18,19 . Было продемонстрировано, что как безобидные, так и вредные раздражители вызывают изменения амплитуды и фазы корковых колебаний 18 .В частности, безобидный тактильный стимул вызывает снижение спектральной мощности ЭЭГ в альфа-диапазоне частот (11–13 Гц) и бета-диапазоне частот (21–28 Гц) с последующим увеличением бета-частоты. полоса над сенсомоторной областью коры 18,19,20,21 . В ЭЭГ этот тип уменьшения и увеличения мощности корковых колебаний часто называют десинхронизацией, связанной с событием (ERD) и синхронизацией (ERS), соответственно. Ядовитое тепло и лазерные раздражители также вызывают ERD и / или ERS в альфа- и бета-диапазоне в сенсомоторной области 22,23 .В настоящем исследовании мы исследовали, как эти альфа- и бета-паттерны ERD / ERS менялись в зависимости от различных стимулов, включая механическое давление, лазер и тепло. Мы предполагаем, что, если человек ощущает не ноцицептивное тактильное ощущение при лазерной стимуляции, паттерны, вызванные ERD / ERS, в этом случае должны быть аналогичны паттернам при механической тактильной стимуляции, но отличаться от паттернов при ноцицептивной лазерной стимуляции. В дополнение к ERD / ERS-анализу мы также исследовали латентность событийно-связанных потенциалов (ERP), вызванных различными стимулами.Поскольку сенсорный ввод, опосредованный кожными ноцицептивными волокнами, достигает кортикальных областей медленнее, чем тот, который опосредован не ноцицептивными волокнами, мы предположили, что латентный период ERP, вызванный ноцицептивной лазерной стимуляцией, будет дольше, чем латентный период, вызванный не ноцицептивной лазерной стимуляцией.
Сначала мы исследовали поведенческие реакции участников на лазерную стимуляцию, также периодически доставляя фиктивные стимулы. После каждой стимуляции участников просили выбрать один из трех ответов: нет ощущения, безболезненное ощущение и болезненное ощущение.Они обнаружили лазерную стимуляцию с точностью 75,8%. Чувствительность восприятия стимула с учетом лазерного стимула составляла 68,6%, а специфичность восприятия стимула с учетом ложного стимула составляла 97,4%. Кроме того, при предъявлении лазерного стимула 56,3%, 12,3% и 31,4% участников сообщили о безболезненном ощущении, болезненном ощущении и отсутствии ощущения, соответственно (рис. 5а). Отмечается, что во избежание повреждения кожи параметры лазера были выбраны в пределах допустимого уровня MPE.После каждого эксперимента мы визуально подтверждали отсутствие повреждений облученного участка кожи каждого участника. Результат, заключающийся в том, что 12,3% участников ощущали боль от лазерной стимуляции, вероятно, связан с индивидуальными различиями в неконтролируемых факторах, таких как пол 24,25 , возраст 26,27 и толщина жировой ткани 28 .
Рисунок 5Эксперименты по тактильным ощущениям человека: поведенческие реакции на лазерные стимулы.
а. Поведенческие реакции двадцати участников на лазерную стимуляцию с прерывистыми ложными стимулами.Участников попросили выбрать одно из трех ощущений, то есть отсутствие, не ноцицептивное и ноцицептивное, после каждого стимула. Они могли отличить наличие лазерной стимуляции от ее отсутствия с точностью до 75,8%. Чувствительность (ощущение лазерных стимулов) и специфичность (отсутствие фиктивных стимулов) составили 68,6% и 97,4% соответственно. При использовании лазерного раздражителя 56,3% из них сообщили о не ноцицептивном ощущении, 12,3% из них — о ноцицептивном ощущении, а 31,4% из них не чувствовали. г. Классификация постсессионного субъективного описания тактильных ощущений участниками, которые сообщили о неболевых ощущениях в ответ на лазерные стимулы. Субъективные описания были разделены на механические ощущения (75%), электрические (21,4%) или тепловые (3,6%). г. Дальнейшее распределение описаний, соответствующих механическим ощущениям: легкое прикосновение (14,3%), надавливание (6,3%), покалывание (36,5%), покалывание (28,6%) и растекание (14,3%). Это указывает на то, что регулярные механические ощущения (легкое прикосновение и нажатие) воспринимались с частотой 20.6%, в то время как те, которые связаны с очень узкой областью контакта (укол и покалывание), были выявлены с частотой 65,1%. (Рис. 5 был получен из Университета науки и технологий Пхохана, нарисован программным обеспечением MATLAB и создан Seungmoon Choi)
Субъективные описания участников, которые сообщили о неболевых ощущениях, были классифицированы как более механические (75%), чем электрические (21,4%) или тепла (3,6%), как показано на рис. 5b. Описания, соответствующие механическим ощущениям, далее распределялись как (рис.5в): легкое прикосновение (14,3%), надавливание (6,3%), покалывание (36,5%), покалывание (28,6%) и распространение (14,3%). Регулярные механические ощущения (легкое прикосновение и надавливание) возникали у 20,6%, а ощущения, связанные с очень узкой зоной контакта (покалывание и покалывание), — у 65,1%. Распространение — уникальное ощущение для лазерной стимуляции, и участники часто описывают его как ощущение, которое начинает ощущаться в точке чуть ниже кожи, а затем вскоре переходит на кожу с увеличивающимся объемом.Основания для распространения в настоящее время неизвестны, но одно из возможных объяснений состоит в том, что внезапный термоупругий взрыв, вызванный лазерной стимуляцией, может вызвать ощущение, почти одновременно активируя все сенсорные рецепторы поблизости.
Наконец, мы исследовали время отклика (RT) участников в ответ на лазерную стимуляцию. Для каждой реакции отсутствия ощущений, безболезненных ощущений и болевых ощущений на лазерную стимуляцию средняя RT составляла 606 ± 191 мс, 460 ± 151 мс и 513 ± 152 мс соответственно.Тест t показал, что средняя RT для безболезненного ощущения была значительно короче, чем для болевого ощущения ( p <0,05). Это означает, что индуцированное лазером неболевое ощущение, вероятно, будет доставлено через не ноцицептивные афференты Aβ-волокон, которые действуют быстрее, чем ноцицептивные афференты. Также предполагается, что более длительная RT для отсутствия ощущений может быть связана с дополнительными когнитивными процессами у участников, гарантирующими, что стимул не был обнаружен.
На рис. 6b показано изменение мощности корковых колебаний во времени, вызванное в контрлатеральной сенсомоторной области различными стимулами, такими как давление, лазер и тепло.Периоды после стимула, показывающие значительное изменение мощности по отношению к исходному уровню (то есть средняя мощность до начала стимула), были отмечены как заштрихованные области с использованием статистической оценки, основанной на t -тесте ( p <0,01). В то время как механическая стимуляция индуцировала альфа-ERD и бета-ERD, а также бета-ERS, термическая стимуляция индуцировала альфа-ERD и бета-ERD, но не вызывала значительного бета-ERS. Кортикальные реакции на лазерную стимуляцию анализировали в соответствии с поведенческими реакциями участников.Прежде всего, у участников, которые не сообщали об отсутствии чувств, не наблюдалось значительных альфа-ERD, бета-ERD и бета-ERS. Ложный стимул также не вызывал значительных альфа- или бета-ERD / ERS. Однако альфа-ERD и бета-ERD были обнаружены в контралатеральной сенсомоторной области, когда они сообщили о ноцицептивном ощущении. С другой стороны, когда они сообщили о безобидном ощущении, бета-ERS также наблюдалась вместе с альфа-ERD и бета-ERD. Таким образом, результаты альфа- и бета-анализов ERD / ERS указывают на сходство паттернов корковой активности между механической стимуляцией и лазерной стимуляцией с безобидными ощущениями.
Рис. 6Эксперименты на ЭЭГ человека: Кортикальные реакции на механические, лазерные и тепловые раздражители.
а. Простые иллюстрации механической, лазерной и термической стимуляции. г. Временное изменение мощности корковых колебаний, вызванных в контрлатеральной сенсомоторной области давлением, лазерными и тепловыми раздражителями. Периоды после стимула со значительными изменениями мощности ( p <0,01) были отмечены заштрихованными областями. Механическая стимуляция индуцировала альфа (420 ~ 839 мс) и бета-ERD (212 ~ 316 мс), а также бета-ERS (526 ~ 1500 мс).Термостимуляция индуцировала альфа (354 ~ 907 мс) и бета-ERD (395 ~ 599 мс) без бета-ERS. Никаких значительных изменений не наблюдалось, когда участники сообщали об отсутствии ощущений при лазерной стимуляции или когда им давали мнимую стимуляцию. Альфа (379 ~ 442 мс) и бета ERD (233 ~ 316 мс) были обнаружены, когда участники сообщали о болевых ощущениях при лазерной стимуляции. Когда участники сообщали о не ноцицептивных ощущениях, бета-ERS наблюдалась через 923 мс после стимуляции и др. ong с альфа (254 ~ 756 мс) и бета ERD (169 ~ 316 мс). г. Топография головного мозга была показана для данных ЭЭГ, выбранных в определенное время (обозначенное треугольниками), когда изменение ERD / ERS было наиболее отчетливым. Все стимулы индуцировали альфа-ERD (первый ряд) и бета-ERD (второй ряд) в контрлатеральной сенсомоторной области (первый ряд). После бета-ERD сенсомоторная бета-ERS генерировалась только механическими и не ноцицептивными лазерными стимулами (третий ряд). Кроме того, задний бета-ERS наблюдался в средней задней области с помощью ноцицептивных лазерных стимулов. г. Двухмерное пространственное представление корковых колебаний. Пространственно-временные паттерны ERD / ERS, реагирующие на различные стимулы, проецировались на двумерное пространство с использованием многомерного масштабирования. В альфа-колебаниях паттерны ERD / ERS с лазерно-индуцированными не ноцицептивными и ноцицептивными ощущениями были ближе к таковым при механической стимуляции. В бета-колебаниях паттерн ERD / ERS с индуцированным лазером не ноцицептивным чувством был намного ближе к механическим ощущениям, чем другие. (Рис.6 был получен из Ульсанского национального института науки и технологий, нарисован с помощью программного обеспечения MATLAB и создан Сунг-Филом Кимом)
Чтобы визуально представить корковые реакции над мозгом, топография мозга представлена на рис.6c с использованием данных, выбранных в определенное время (обозначенное фиолетовым треугольником), когда вариация корковых колебаний была наиболее отчетливой. Все стимулы вызвали альфа-ERD в контралатеральной сенсомоторной области (первый ряд). Бета-ERD также индуцировалась всеми стимуляциями с латентностью 500 мс (второй ряд), и после исчезновения бета-ERD бета-ERS генерировалась в сенсомоторной области только механическими и лазерными стимуляциями с безобидными ощущениями (треть ряд).Примечательно, что, когда сообщалось, что лазерная стимуляция вызывает неприятное ощущение, бета-ERS наблюдалась в средней задней области, а не в контрлатеральной сенсомоторной области 29 .
Чтобы лучше продемонстрировать сходство между механической и безобидной лазерной стимуляцией по сравнению с другими методами стимуляции, сходство между паттернами изменения корковой энергии в ответ на разные стимулы было рассчитано с помощью линейной корреляции и спроецировано на двумерное пространство с использованием многомерного масштабирования (MDS). ), как показано на рис.6г. В случае альфа-колебаний лазерная стимуляция с не ноцицептивным или ноцицептивным ощущением была пространственно ближе к механической стимуляции, чем термическая или лазерная стимуляция без ощущения. С другой стороны, в случае бета-колебаний, лазерная стимуляция с не ноцицептивным чувством была намного ближе к механической стимуляции, чем другие, тем самым демонстрируя, что лазерная стимуляция с не ноцицептивным чувством может вызвать корковые реакции, аналогичные безобидной механической стимуляции.
Наконец, мы измерили латентность ERP в ответ на лазерную стимуляцию путем измерения латентности первых больших отрицательных пиков ERP. Когда участники сообщили о неприятном ощущении, средняя задержка составила 236 ± 34 мс. Напротив, когда они сообщили о безобидном ощущении, средняя задержка составила 165 ± 46 мс. Мы также измерили задержку ERP в ответ на механическое моделирование и обнаружили, что средняя задержка составляет 152 ± 23 мс. Эти результаты согласуются с результатами вызванного лазером потенциала (LEP), вызванного на 220 мс (N220) с болезненными ощущениями, или с тактильными ощущениями, вызванными соматосенсорами (SEP), вызванными на 140 мс (N140) с безболезненными тактильными ощущениями 30 , 31 .Была обнаружена значительная разница в латентном периоде между механической, болезненной лазерной и безболезненной лазерной стимуляцией (p <0,01). Post-hoc t -тесты выявили разницу между болезненной и безболезненной лазерной стимуляцией или между болезненной лазерной и механической стимуляциями (p <0,01, коррекция Бонферрони), но не между безболезненной лазерной и механической стимуляциями (p> 0,05, Поправка Бонферрони). Таким образом, предполагается, что ответы коры головного мозга на лазерную стимуляцию, вызывающую безобидное ощущение, скорее всего, будут вызваны не ноцицептивным быстрым воздействием, тогда как ответы на лазерную стимуляцию, вызывающую болезненное ощущение, вызваны ноцицептивным медленным воздействием.
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файлах cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.