Структура систем автоматического управления
Навигация:
Главная → Все категории → Решения комплексов очистных сооружений
Выделяется три типа автоматизированных систем управления технологическими процессами водоотведения: – система управления водоотводящей сетью; – система управления канализационными насосными станциями; – система управления очистными сооружениями.
Внутри каждой системы имеются следующие структуры: функциональная; организационная; информационная; программная; техническая.
Основой создания системы является функциональная структура, при этом остальные структуры определяются самой функциональной структурой.
По функциональному признаку каждая системы управления подразделяется на три подсистемы: – оперативный контроль и управление технологическими процессами; – оперативное планирование технологических процессов; – расчет технико-экономических показателей, анализ и планирование работы системы водоотведения.
Кроме того, подсистемы могут быть разделены по критерию оперативности (длительности выполнения функций) на иерархические уровни. Группы однотипных функций одного уровня объединяются в блоки.
Функциональная структура АСУ работы водоотводящей сети приведена на рис. 20.1, насосными станциями – на рис. 20.2, очистными сооружениями – на рис. 20.3.
Рис. 20.1. Функциональная структура АСУ системы водоотведения
Рис. 20.2. Функциональная структура АСУ насосными станциями
Рис. 20.3. Функциональная структура АСДКУ очистными сооружениями
Для повышения оперативности передачи данных, связи с диспетчерскими пунктами и управления водоотведением, работой канализационных насосных станций, а также процессами очистки сточной воды и обработки осадков водоотведения можно рекомендовать замену не всегда надёжной системы телефонной связи на оптоволоконную. При этом большинство процессов в автоматических системах управления водоотводящими сетями, насосными станциями и станциями очистки сточных вод будет выполняться на ЭВМ. Это также распространяется на учёт, анализ, расчёты перспективного планирования и работы, а также выполнение необходимых документов для отчётности о работе всех систем и сооружений водоотведения.
Это также распространяется на учёт, анализ, расчёты перспективного планирования и работы, а также выполнение необходимых документов для отчётности о работе всех систем и сооружений водоотведения.
Для обеспечения бесперебойной работы систем водоотведения на основании учёта и анализа отчётности возможно осуществлять перспективное планирование, которое, в конечном итоге, повысит надёжность работы всего комплекса.
Похожие статьи:
Проектирование и строительство систем водоотведения
Навигация:
Главная → Все категории → Решения комплексов очистных сооружений
Статьи по теме:
Главная → Справочник → Статьи → Блог → Форум
Структура системы управления — презентация онлайн
Структура системы управленияВнешняя среда
(поставщики, заказы, население,
законы, политика, экология)
Управляющая подсистема
(субъект управления)
Управляющие воздействия
Управляемая подсистема
(объект управления)
Результат
Иерархия менеджмента
В зависимости от уровня управления менеджеры делятся на
три группы:
Высшее руководство
(ТОР-management)
Среднее звено
(функциональный)
Низшее звено
(линейный)
Информационное воздействие уровней
менеджмента
Управленческий цикл
Управленческий цикл (условно) начинается функцией планирования, и
рассматривается как на начальный этап.
 Процесс коммуникаций образует
Процесс коммуникаций образуетсоздает среду управляющего воздействия.
а
Принятие решений
Планирование
Контроль
Организация
Мотивация
ПЛАНИРОВАНИЕ
как функция управления
ЦЕЛЕПОЛАГАНИЕ
ПРОГНОЗИРОВАНИЕ
ПЛАНИРОВАНИЕ
6. Горизонты планирования
Высшее руководство(TOP-Management)
Миссия, стратегические
цели и планы организации
Менеджеры среднего звена
(функциональные
руководители)
Тактические цели и
функциональные планы
Менеджеры нижнего звена
(Линейные руководители)
Оперативные цели и планы
Проблема
Стратегические
Выбор товаров и рынков, оптимизирующих возврат
инвестиций компании
Распределение ресурсов по альтернативным товарам и
рынкам
Ключевые решения
Цели и задачи. Финансовая стратегия. Административная
стратегия.
Стратегия
диверсификации.

Стратегия
расширения. Метод роста. Время роста.
Основные
характеристики
Централизованные
решения,
незнание
части
информации, решения не повторяются, решения не ведут
к появлению подобных же проблем.
Тактические (управленческие, административные)
Проблема
Суть проблемы
Структуризация ресурсов компании для их эффективного
использования
Организация приобретения и развития ресурсов
Организация:
структурирование
информации,
полномочий и ответственности. Структура потребления
ресурсов: рабочие потоки, система распределения,
расположение помещений и оборудования. Приобретение
и развитие ресурсов: финансирование, помещения и
оборудование, персонал и сырье.
Основные
характеристики
Конфликт между стратегией и текущими операциями,
между личными и организационными целями. Сильная
взаимозависимость
экономических
и
социальных
факторов.
 Решения принимаются по мере возникновения
Решения принимаются по мере возникновениястратегических и/или оперативных проблем.
Оперативные
Оптимизация степени возврата инвестиций
Суть проблемы
Руководство и контроль. Распределение ресурсов по
принципиальным
функциональным
областям
и
составление планов их потребления.
Ключевые решения
Оперативные цели и задачи. Уровни цен и выпуска
продукции. Оперативные уровни: графики производства,
уровни
запасов,
складирование.
Маркетинговые
мероприятия и стратегия. Исследования и разработки.
Контроль.
Основные
характеристики
Децентрализованность
решений.
Риск
и
неопределенность. Повторяющиеся решения. Большой
Сложность ведет к
внутренней оптимизации. Саморождающиеся решения.
10. Функция организации как процесс
Организация как функция управленияВЫБОР ОРГАНИЗАЦИОННОЙ СТРУКТУРЫ
ПОСТРОЕНИЕ СХЕМЫ УПРАВЛЕНИЯ
ДЕЛЕГИРОВАНИЕ
ПОЛНОМОЧИЙ
11.
 Линейная организационная структура управления Руководители
Линейная организационная структура управления РуководителиСреднего
Уровня
Высшее руководство
Руководители
Нижнего
Уровня
Исполнители
Пример:
Начальник цеха
Начальник
участка №1
Мастер
…
Начальник
участка №2
Мастер
…
Мастер
…
И С П О Л Н И Т Е Л И
Мастер
…
13. Функциональная организационная структура управления
ФункциональныеРуководители
Исполнители
Высшее руководство
Пример:
Директор
инженер
Начальник
производства
Начальник
участка №1
Коммерческий
директор
Начальник
участка №2
Мастер
Мастер
Мастер
…
…
…
Мастер
…
Преимущества и недостатки
функциональной структуры по
сравнению с линейной
Преимущества
1. Стимулирует деловую и
Недостатки
1. Возможность конфликтов
профессиональную
активность
2. Уменьшает дублирование
усилий и потребление
ресурсов в
функциональных областях
3.

функциональных областях
между различными
функциональными
областями, вследствие
различий в интересах и
задач разных
подразделений
Увеличивается цепь команд
от руководителя до
непосредственного
исполнителя
Преимущества и недостатки различных
организационных структур
Линейно-штабная организационная
структура управления
Руководители
Среднего
Уровня
Высшее руководство
Штаб
Штаб
Исполнители
Руководители
Нижнего
Уровня
Штаб
Дивизиональные организационные
структуры управления
Высшее руководство
Дивизионы
Заготовки
Исполнители
Сбыт
Проектная (матричная)
организационные структуры
управления
МОТИВАЦИЯ как функция управления
МОТИВАЦИЯ ПЕРСОНАЛА
РУКОВОДСТВО
ПЕРСОНАЛОМ
Простая модель мотивации
ПОТРЕБНОСТЬ
Возникновение желания
в удовлетворении
потребности (в пище,
друзьях, признании,
достижениях)
ПОВЕДЕНИЕ
ВОЗНАГРАЖДЕНИЕ
Действия,
направленные на
удовлетворение
потребностей
Удовлетворение
потребности
ОБРАТНАЯ СВЯЗЬ
Ценность вознаграждения определяет приемлемость и целесообразность будущего
поведения
Пирамида потребностей Маслоу
Самовыражение
Уважение
Вторичные
Безопасность и защита
Физиологические потребности
Первичные
Контроль
как функция управления
Установление
стандартов
УЧЁТ
КОНТРОЛЬ
АНАЛИЗ
РЕГУЛИРОВАНИЕ
ОБЪЕКТ УПРАВЛЕНИЯ
Структура системы управления охраной труда
Под управлением охраной труда понимается
подготовка,
принятие и реализация решений по осуществлению организационных,
технических,
санитарно-гигиенических и лечебно-профилактических мероприятий,
направленных на
обеспечение безопасности, сохранение здоровья и работоспособности
человека в
процессе труда.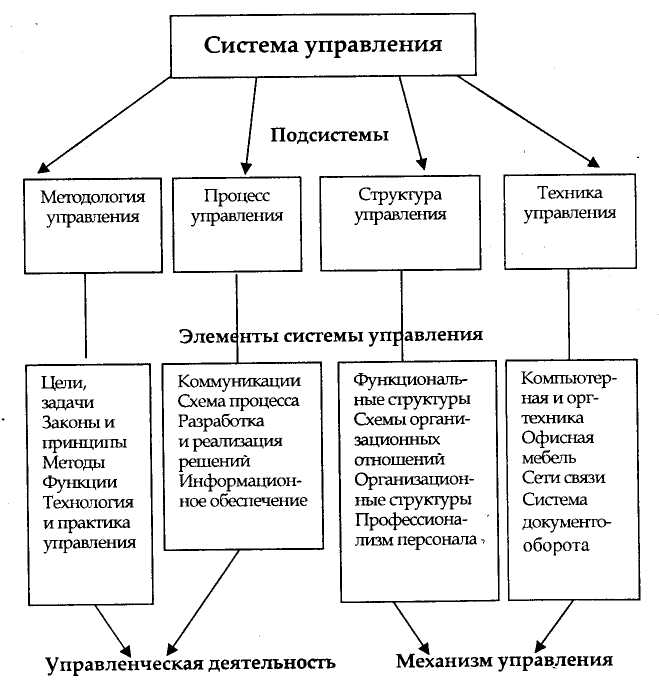 Управление охраной труда на предприятии является
составной
частью его общей системы управления.
На
предприятиях, имеющих
автоматизированные системы управления производством, управление охраной
труда
входит в них в качестве одной из основных подсистем.
Управление охраной труда на предприятии является
составной
частью его общей системы управления.
На
предприятиях, имеющих
автоматизированные системы управления производством, управление охраной
труда
входит в них в качестве одной из основных подсистем.
В
подготовке и реализации управленческих решений по охране труда
участвуют
практически все службы и подразделения предприятия, деятельность
которых в этой
области определена соответствующими положениями о Системе управления
охраной
труда (СУОТ).
Структура СУОТ на предприятии представлена ниже и включает следующие
основные
элементы.
Орган
управления СУОТ. Его возглавляет директор (главный инженер),
осуществляющий общее руководство работой по охране труда на предприятии
с
помощью управленческих решений (приказов, распоряжений, планов
организационно-технических мероприятий и т. п.), методов управления и
воздействия, обеспечивающих целенаправленную деятельность структурных
подразделений и служб в области охраны труда.
В цехах
(участках, службах) функции органа управлении выполняют руководители
подразделений, организующие и систематически проводящие работу по
охране труда
в возглавляемых звеньях. Все они в своей деятельности руководствуются
законодательной (нормативно-правовой) документацией и текущей
информацией о
состоянии охраны труда. Работа проводится на основе анализа текущей
информации,
исходя из которого обосновываются и оперативно разрабатываются
управленческие
решения, направленные на приведение фактических показателей условий
труда в
соответствие с нормативными.
Организационно-методический орган. Он возглавляется отделом охраны
труда
(техники безопасности), который наряду с организационно-методическим
руководством работой по управлению охраной труда подготавливает
управленческие
решения для органа управления СУОТ, контролирует их реализацию. Эта
работа
отделом проводится совместно с комиссией охраны труда профкома и
медико-санитарной частью предприятия исходя из систематического анализа
текущей
информации о состоянии охраны труда и функционирования СУОТ,
Информационный орган.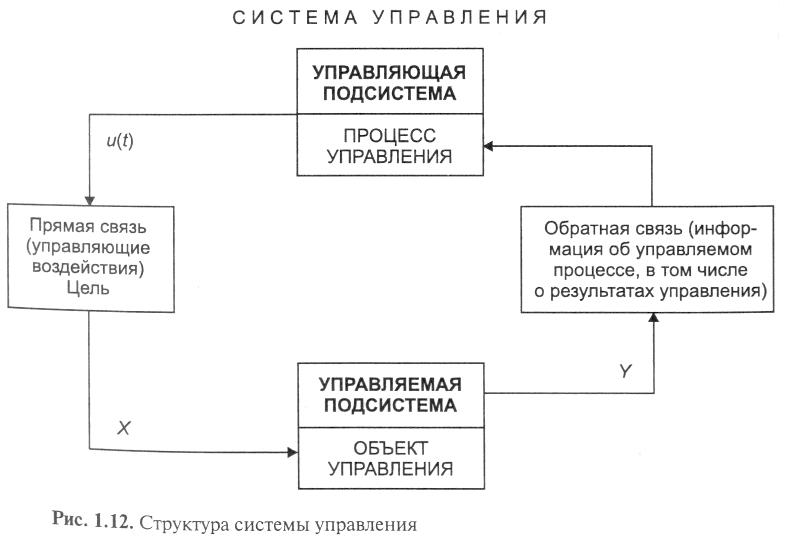 Его функции должен выполнять ИВЦ предприятия. Он
собирает, обобщает, обрабатывает, анализирует и выдает информацию,
дифференцированную применительно к структуре СУОТ предприятия.
Информация
содержит сведения о состоянии условий труда в цехах, на участках и
рабочих
местах, на предприятии в целом; эффективности СУОТ и отдельных методов
управления; динамике травматизма и заболеваемости, их причинах; об
изменениях
нормативной базы по безопасности труда применительно к конкретным
условиям
предприятия и др.
Его функции должен выполнять ИВЦ предприятия. Он
собирает, обобщает, обрабатывает, анализирует и выдает информацию,
дифференцированную применительно к структуре СУОТ предприятия.
Информация
содержит сведения о состоянии условий труда в цехах, на участках и
рабочих
местах, на предприятии в целом; эффективности СУОТ и отдельных методов
управления; динамике травматизма и заболеваемости, их причинах; об
изменениях
нормативной базы по безопасности труда применительно к конкретным
условиям
предприятия и др.
Объект управления в СУОТ. Объектом управления является деятельность
функциональных служб и структурных подразделений предприятия по
обеспечению
безопасных и здоровых условий труда на рабочих местах, в бригадах, на
участках,
в цехах и на предприятии в целом.
Полезная информация:
2421 Аналитики систем управления и организации / КонсультантПлюс
2421 Аналитики систем управления и организации
Аналитики систем управления и организации оказывают содействие организациям в достижении более высокой эффективности и решении организационных проблем. Они изучают организационные структуры, методы, системы и процедуры.
Они изучают организационные структуры, методы, системы и процедуры.
В их обязанности входит:
— содействие и стимулирование в области определения целей, стратегий и планов, направленных на удовлетворение запросов потребителей и рациональное использование ресурсов организации;
— анализ и оценка действующих систем управления и организационных структур;
— обсуждение с персоналом рациональности действующих систем управления и оценка их эффективности на всех уровнях организации;
— предоставление клиентам рекомендаций по вопросам эффективной организации и разработке решений организационных проблем;
— проведение и анализ исследований в сфере организации труда посредством анализа существующих и предложенных методов и процедур, включая административные и служебные процедуры и бизнес-процессы;
— составление и анализ графиков последовательности операций, документов, отчетов, руководств и должностных инструкций организации;
— подготовка и внесение предложений для пересмотра методов и процедур, изменения трудовых процессов, перераспределения должностных обязанностей и решения организационных проблем;
— содействие в реализации одобренных рекомендаций, выпуск пересмотренных инструкций и процедурных руководств, а также подготовка проектов другой документации;
— пересмотр рабочих процедур и рекомендации относительно отступлений от процедур и стандартов.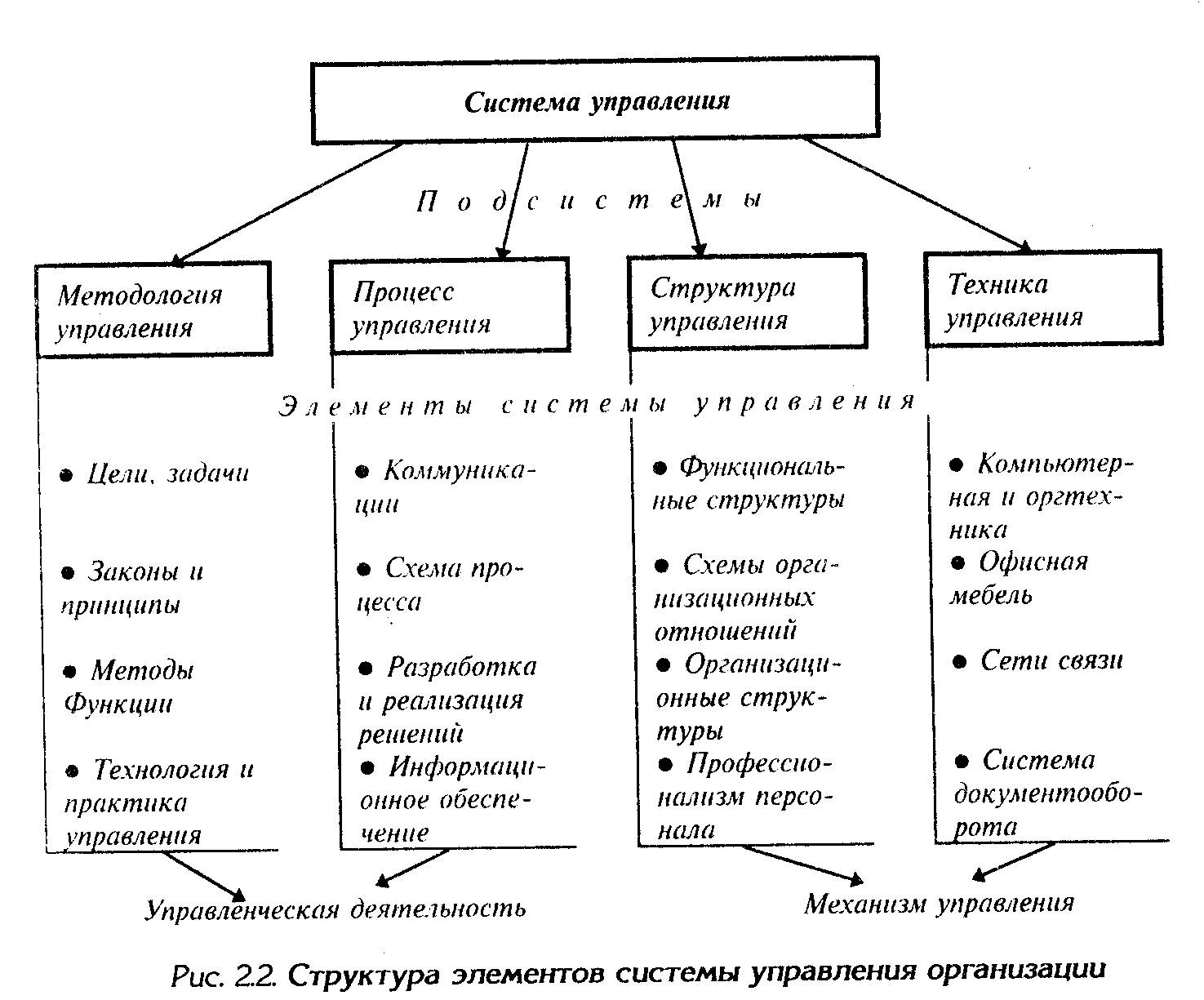
Примеры занятий, отнесенных к данной начальной группе:
Бизнес-консультант
Консультант по вопросам рационализации управления
Консультант по вопросам управления
Некоторые родственные занятия, отнесенные к другим начальным группам:
Инженер по рационализации — 2141
Бизнес-аналитик (информационные системы) — 2511
Открыть полный текст документа
Автоматизированные системы управления структура — Справочник химика 21
Третья, высшая ступень иерархической структуры химического предприятия (см. рис. 1) —это системы оперативного управления совокупностью цехов, системы организации производства, планирования запасов сырья и реализации готовых продуктов— автоматизированная система управления предприятием (АСУП). На этой ступени иерархии возникают задачи ситуационного анализа и оптимального управления всем предприятием, для решения которых применяют математические методы системотехники— линейное программирование, теорию игр, теорию информации, исследования операций, теории массового обслуживания и др.
 [c.13]
[c.13]Задачу автоматизации функций системы управления крекингом можно решить только при условии применения вычислительной техники, о чем свидетельствует отечественный и зарубежный опыт автоматизации установок каталитического крекинга. В связи с этим построение автоматизированной системы управления предусматривает также решение комплекса вопросов, связанных с синтезом структуры технических средств АСУ ТП. [c.37]
Структура и задачи автоматизированной системы управления производством. [c.366]
В данной работе для повышения безопасности химических производств предлагается использовать качественно новый тип интеллектуальных автоматизированных систем — интегрированные автоматизированные системы контроля и диагностики неисправностей, оценки риска и управления безопасностью (ИАСУ безопасностью). Функциональная структура ИАСУ безопасностью химических производств приведена на безопасностью ХП являются интеллеетуальными многоуровневыми человеко-машинными системами. [c.175]
[c.175]Однако необходимо иметь в виду, что разработка оптимизационных моделей производится в автоматизированной системе управления, т. е. в системе, где предполагается осуществленной автоматизация. В такой системе нефтеперерабатывающие предприятия существенным образом запрограммированы на выпуск продукции в постоянных соотношениях. Следовательно, обсуждение реализуемости текущих плановых заданий может вестись только в двух основных направлениях либо принадлежащее НПК оборудование пригодно к эксплуатации в соответствии с существующим технологическим регламентом, либо, в связи с возникающими проблемами взаимосвязи со сторонними организациями, моральным устареванием ряда установок, а также выходом из строя оборудования установок, возникает необходимость обоснования оптимального ввода новых мощностей, изменения технологической структуры переработки нефти. [c.119]
ФУНКЦИОНАЛЬНАЯ СТРУКТУРА ПОДСИСТЕМЫ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ИНТЕГРИРОВАННОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ КАЧЕСТВОМ АТМОСФЕРНОГО ВОЗДУХА [c.
 131]
131] На стадии разработки часто необходимо сравнивать разные варианты построения АСУ. Эти варианты могут различаться по составу технических устройств и схем их соединения, набору функций (задач), составу математического обеспечения и т. п., в соответствии с чем будут характеризоваться разными величинами капитальных и эксплуатационных затрат и экономических эффектов от использовапия АСУ. Трудность сравнения АСУ по векторам их разнородных показателей усугубляется тем, что степень выполнения своих ф5 нкций автоматизированной системой управления не является одинаковой во времени. Как и во всякой сложной системе, выход из строя отдельных элементов (устройств) АСУ не означает ее отказа в целом, а приводит к временному ухудшению качества выполнения ею своих функций. Способность АСУ выполнять свои функции при отказе некоторых элементов называется эффективностью. Если оценить эффективность системы некоторой количественной мерой и учесть в ней и другие показатели АСУ, то полученный критерий эффективности может быть использован для сравнения различных вариантов построения автоматизированной системы управления и синтеза ее оптимальной структуры. [c.39]
[c.39]
Рассмотрена классическая структура управления сернокислотным цехом. Разработана новая структура управления в условиях АСУ. Описаны функции и задачи автоматизированной системы управления цехом серной кислоты. Илл. 2. [c.301]
Автоматизированные системы управления обладают всеми наиболее характерными чертами, специфичными для сложных технических систем., К их числу следует отнести большой масштаб систем по числу составляющих элементов и выполняемых функций наличие функциональной целостности, общего назначения и цели сложную многоуровневую иерархическую структуру высокую степень автоматизации, определяющую известную [c.6]
Типичным примером сложной системы являются современные территориальные автоматизированные системы управления (АСУ) или сети ЭВМ, представляющие собой совокупность объектов управления — вычислительных центров (ВЦ) — различных уровней иерархии, объединяемых в единое целое сетью (системой) обмена данными — информационной сетью (ИС), через которую осуществляется целевое взаимодействие объектов управления или ВЦ друг с другом. При этом объекты управления АСУ, будучи источниками и получателями информации, являются оконечными узлами ИС. Кроме того, для обеспечения возможности использования различных путей передачи информации между заданными парами оконечных узлов, а также для увеличения коэффициента использования каналов связи в ИС обычно предусматриваются специальные элементы, называемые узлами коммутации. Важно подчеркнуть, что независимо от числа уровней иерархии, определяющих структуру управления АСУ, физическая структура построенных по такому принципу систем управления по существу определяется структурой ИС. На этом основании будем описывать физическую структуру АСУ или сетей ЭВМ с помощью математического аппарата и подходов, которые обычно используются при исследовании информационных сетей. [c.546]
При этом объекты управления АСУ, будучи источниками и получателями информации, являются оконечными узлами ИС. Кроме того, для обеспечения возможности использования различных путей передачи информации между заданными парами оконечных узлов, а также для увеличения коэффициента использования каналов связи в ИС обычно предусматриваются специальные элементы, называемые узлами коммутации. Важно подчеркнуть, что независимо от числа уровней иерархии, определяющих структуру управления АСУ, физическая структура построенных по такому принципу систем управления по существу определяется структурой ИС. На этом основании будем описывать физическую структуру АСУ или сетей ЭВМ с помощью математического аппарата и подходов, которые обычно используются при исследовании информационных сетей. [c.546]
Структура автоматизированной системы управления производственно-хозяйственной деятельностью ООО Волготрансгаз приведена на рис, 2. [c.30]
Общая структура программного обеспечения автоматизированных систем управления устанавливается стандартом ОСТ 25 920—80 Автоматизированные системы управления Программное обеспечение [c. 130]
130]
Для ГТС как организационно-ситуационных объектов предлагается разрабатывать АСУ ТП на основе использования семиотических моделей ГТС, отображающих все виды декларативных и процедурных знаний о ГТС. Предложена функциональная структура автоматизированной системы ситуационного управления (АССУ) и формализованы отличия структуры АССУ как от структуры традиционных АСУ ТП, Так и от архитектуры экспертных систем. [c.266]
Основными направлениями совершенствования организационной структуры управления отраслью является переход нефтеперерабатывающей и нефтехимической промышленности на двухзвенную структуру управления, рост числа производственных и научно-производственных объединений, укрупнение действующих предприятий на основе специализации,кооперирования и комбинирования, оптимизация распределения функций управления между отдельными звеньями отраслевой системы, широкое внедрение автоматизированных систем управления и управленческой техники. Так, число производственных объединений возросло с 10 в 1975 г. до 34 в 1985 г. Удельный вес продукции, выпускаемой производственными объединениями, составил в 1985 г. около 60% от общего производства продукции в отрасли, что почти в 3,5 раза больше, чем в 1975 г. [c.155]
до 34 в 1985 г. Удельный вес продукции, выпускаемой производственными объединениями, составил в 1985 г. около 60% от общего производства продукции в отрасли, что почти в 3,5 раза больше, чем в 1975 г. [c.155]
Характерными особенностями автоматизированных систем управления является то, что они состоят из ряда подсистем, имеют иерархическую структуру, и если часть функций головного мозга и передается системе, то все же на данном этапе за человеком в АСУ остаются функции принятия решений. Именно то обстоятельство, что объект управления стал значительно сложнее, и привело к расширению круга задач, которые решаются при построении автоматизированных систем управления, и увеличению сложности самих систем. Совершенствование технических средств, естественно, является существенной предпосылкой возможности создания системы управления сложным объектом (например, рост быстродействия, объема памяти и т. п.). Вместе с тем применение современных технических средств выдвигает дополнительные требования к разработке методов получения, обработки и передачи информации.
 Применение современных электронных вычислительных и управляющих машин в системах управления потребовало разработки специальных языков, методов построения алгоритмов управления, входных и выходных устройств, а также согласующих устройств для связи объекта с машиной, методов преобразования информации и т. д. Эти требования сводились к формализации процессов получения, обработки и передачи информации. [c.9]
Применение современных электронных вычислительных и управляющих машин в системах управления потребовало разработки специальных языков, методов построения алгоритмов управления, входных и выходных устройств, а также согласующих устройств для связи объекта с машиной, методов преобразования информации и т. д. Эти требования сводились к формализации процессов получения, обработки и передачи информации. [c.9] Система ДИАХИМ [53] (Диалоговая система для химических научных исследований) была разработана в МГУ в качестве логического продолжения системы АСУМ МС (Автоматизированная Система Управления Моделями Молекулярных Систем). Система ДИАХИМ в отличие от американских систем сразу была ориентирована на работу именно с пространственными трехмерными моделями молекулярных систем. Особенностью этой системы является то, что задача автоматизации химических исследований ставится здесь как задача дискретного оптимального управления. При таком подходе все поисковые задачи (а сннтез заданного химического вещества в конечном счете — тоже поиск последовательности химических реакций, приводящих к нужному результату) оказываются тождественными по своей структуре и различаются лишь видом конкретного функционала задачи управления и физическим смыслом фазовых и управляющих переменных. [c.54]
[c.54]
Структура автоматизированной системы управления, нефте- Снабжением предполагает охватить широкий круг намечаемых решению вопросов текущего и перспективного периода. В АСУнефтеснаб предусматриваются следующие функциональные подсистемы [c.22]
Для повьпиения безопасности химических производств в настоящее время необходимо использовать качественно новый тип интеллектуальных автоматизированных систем — интегрированные автоматизированные системы управления (ИАСУ) безопасностью, объединяющие в единую структуру информационно-моделирующие и управляющие системы, программные комплексы и технические средства сбора и передачи данных на базе локальных вычислительных сетей. [c.14]
Типовая структура ИАСУ химическими предприятиями является трехуровневой системой управления химико-технологическими процессами (ХТП), химико-технологическими системами (ХТС) и химическим предприятием (ХП). Она включает в себя распределенные системы управления ХТП, ХТС, ХП, моделирующие подсистемы для расчетов материальных, энергетических балансов химических производств, интегрированные автоматизированные системы управления (ИАСУ) качеством окружающей среды, качеством продукции, безопасностью и ряд других подсистем по организационному управлению производством в целом. Каждая из подсистем ИАСУ является самостоятельной сложной интегрированной функционально законченной системой, требующей отдельного анализа и проработки. [c.14]
Каждая из подсистем ИАСУ является самостоятельной сложной интегрированной функционально законченной системой, требующей отдельного анализа и проработки. [c.14]
ГО.ООО.243—81 Автоматизированные системы управления. Классификация и кодирование технико-экономической информации. Порядок разработки и утверждения отраслевых классификаторов и классификаторов предприятий 4 ГО.000.253—84 Автоматизированные системы управления. Классификация и кодирование технико-экономической информации. Состав и структура классификаторов технико-экономической информации для функциональных систем ОАСУ [c.223]
В книге дана характеристика капитального строительства как объекта управления. Рассмотреньг основные направления совершенствования управления капитальным строительстволл в химической промышленности. Описаны структура и функции автоматизированной системы управления капитальным строительством и проектированием. Показан опыт внедрения отдельнь х задач управления капитальным строительством в одиннадцатой пятилетке (планирование капитальных вложений, контроль за обеспечением строек оборудованием). [c.224]
[c.224]
В разрабатываемой ЦНИИКА [8, с. 87, 93, 94] автоматизированной системе управления принимается следующая структура соподчиненности и связи технологического персонала с диспетчером цеха (рис. 76). [c.335]
Основу второй ступени иерархии (см. рис. В-5) химического предприятия составляют агрегаты, комплексы и т. д. и автоматизированные системы управления технологическими процессами (АСУТП). Под агрегатом будем понимать взаимосвязанную совокупность отдельных типовых технологических процессов и аппаратов, при взаимодействии которых возникают статистически распределенные по времени возмущения, их наличие подтверждает существование стохастических взаимосвязей между входными и выходными переменными подсистем. Вследствие создания новых высокоинтенсивных технологических процессов, агрегатов большой единичной мощности и реконструкции действующих предприятий с целью оптимизации процессов возникли принципиально новые научно-технические задачи, которые не приходилось решать ранее это организация работы химических производств и агрегатов в оптимальных режимах по экономическим и энерготехнологическим показателям с энергозамкнутыми технологическими потоками и исключением вредных выбросов в окружающую среду передача функций управления самому агрегату через оптимальную организацию материальных и энергетических потоков в агрегате, т. е. придание структуре агрегата кибернетической организации обеспечение надежности функционирования агрегата. [c.14]
е. придание структуре агрегата кибернетической организации обеспечение надежности функционирования агрегата. [c.14]
С переходом управления от ручного и механизированного труда по сбору и обработке информации к автоматизированным системам управления определилась выраженная тенденция интеграции функций управлення — объединения, наирнмер, планирования, учета и анализа в одну функцию. Соответственно меняются организационные структуры управления и [c.29]
Классификация и кодирование технико-экономической информации в ОАСУ Энергия , Для упорядочения потоков информации, оптимизации использования средств вычислительной техники в автоматизированных системах управления осуществляется классификация и кодирование информации о структуре народного хозяйства и средствах труда о предметах труда о трудовых ресурсах о процессах производства о продуктах труда о данных, сопровождающих процессы производства. [c.382]
Автоматизированные системы управления для обогатительных фабрик, как правило, предусматривают герархическую структуру управления, представляемую тремя уровнями управления диспетчер фабрики — операторы цехов — технологический процесс. На каждом уровне управления устанавливают технические средства, необходимые для управления технологией и оборудованием. [c.350]
На каждом уровне управления устанавливают технические средства, необходимые для управления технологией и оборудованием. [c.350]
Под надежностью понимают свойство автоматизированной системы управления (в дальнейшем системы) выполнять заданные функции, сохраняя во времени установленные значения эксплуатационных показателей Надежность системы — комплексное свойство, зависящее от структуры и надежности технических средств, содержания и структуры алгоритмического и программного обеспечения, организации деятельности оперативного персонала, структуры и параметров системы технического обслуживания, квалификации ремонтного персонала, обеспечения ЗИП и сиси мы ею помолнения Надежное гь характеризуется безотказ11и1 и.ю, [c.190]
Система управления выполняет следующие основные функции управляет перемещением складируемых материалов, обрабатывает информацию о функционировании склада. Система управления автоматизированным складом имеет двухуровневую структуру. Автоматизированный склад готовой продукции о бычно расположен в отдельном здании, оборудуется стеллажами с ячейками, в которых установлены поддо- [c.56]
Автоматизированный склад готовой продукции о бычно расположен в отдельном здании, оборудуется стеллажами с ячейками, в которых установлены поддо- [c.56]
Системы ситуационного управления — это интеллектуальные автоматизированные системы, вырабатывающие в режиме диалога с ЛПР управляющие решения на основе накопления и переработки знаний о структуре, свойствах и характеристиках функционирования сложных объектов, для которых в настоящее время частично или полностью не существует полных математических моделей. Эти системы используются для управления сложными промышленными комплексами (отдельными предприятиями, отраслями народного хозяйства, территориально-промышленными комплексами и регионами) в условиях неполной информации, сложными техническими системами (газотранспортными, энергоснабжения, трубопроводными системами магистрального транспорта химических продуктов и др.), для планирования работы в сложных ситуациях (составление графиков работы или циклог- [c. 25]
25]
Инташсктуальной автоматизированной системой ситуационного управления (ИАССУ) называют систему управления организационно-ситуационными объектами, в которых вывод управляющих решений осуществляется в интеллектуальном диалоге с ЛПР как на основе переработки декларативных ЗН о сущности процессов функционирования объекта (отображаемых семиотическими моделями и лингвистическими переменными, качественно характеризующими поведение объекта), так и с использованием данных и процедурных знаний [123]. Функциональная структура ИАССУ может быть представлена следующим кортежем [123] [c.269]
Создание общегосударственной автоматизированной системы сбора и обработки информации предуематриваетея на базе автоматизированных систем управления на различных уровнях народного хозяйства. Место АСУП в общей структуре автоматизированных систем управления видно из классификации АСУ и систем обработки информации, применяемой при планировании их внедрения [c. 383]
383]
В последнее десятилетие начался переход от частичной автоматизации технологических процессов к созданию автоматизированных систем управления ими (АСУТП). Ввиду значительного роста мощности единичных аппаратов появилась проблема создания систем управления на стадии проектирования объекта. Возникла задача поддержания оптимальных режимов не только отдельных аппаратов, но и технологической установки в целом. Важной проблемой является также выбор конструктивных параметров аппаратов и синтез структуры системы автоматического управления с точки зрения единого критерия оптимальности. [c.7]
С увеличением производительности технологических линий при соответственном увеличении объемов реакторов перемешивание и теплосъем существенно усложняются. Поэтому не случайно такие фирмы, как Хехст , Монтэдисон и другие, используют каскады из 2—3 реакторов. Этим обеспечиваются, с одной стороны, сравнительно небольшие габариты каждого из реакторов, с другой стороны, возможность расширения выпускаемого ассортимента продукции за счет использования различных схем обвязки реакторов и их последовательной или параллельной работы. Параллельную схему работы реакторов (на различных режимах) часто используют для регулирования ММР конечного продукта. Последовательная схема, кроме лучших условий доработки катализаторов, позволяет получать сополимеры различного состава и структуры. Надежность работы технологической линии, обеспечивается не только качеством и техническим уровнем используемых технологии и оборудования, но и системой автоматического контроля и управления. Наиболее успешно эта задача решается с помощью автоматизированных систем управления технологическим процессом (АСУ ТП). [c.137]
Параллельную схему работы реакторов (на различных режимах) часто используют для регулирования ММР конечного продукта. Последовательная схема, кроме лучших условий доработки катализаторов, позволяет получать сополимеры различного состава и структуры. Надежность работы технологической линии, обеспечивается не только качеством и техническим уровнем используемых технологии и оборудования, но и системой автоматического контроля и управления. Наиболее успешно эта задача решается с помощью автоматизированных систем управления технологическим процессом (АСУ ТП). [c.137]
Во второй главе рассмотрены вопросы обеспечения экологической безопасности химических производств, связанные с их негативным воздействием на окружающую среду в нормальных режимах функционирования и в результате аварий с выбросами опасных химических веществ. Предложен принципиально новый подход к управлению качеством окружающей среды (на примере атмосферного воздуха) с использованием новых информационных технологий. Описаны функциональные структуры интегрированной автоматизированной системы контроля и управления (ИАСУ) качеством атмосферного воздуха, подсистем прогнозирования и идентификации источников загрязнения, а также системы поддержки принятия решений интегрированной автоматизированной системы контроля и управления качеством атмосферного воздуха. В этой же главе рассмотрены методы, модели и методики прогнозирования загрязнения атмосферного воздуха и идентификации источников загрязнения. Предложено использование нейросете-вого подхода для прогнозирования загрязнения атмосферного воздуха и даны теоретические основы построения искусственных нейронных сетей. [c.11]
Описаны функциональные структуры интегрированной автоматизированной системы контроля и управления (ИАСУ) качеством атмосферного воздуха, подсистем прогнозирования и идентификации источников загрязнения, а также системы поддержки принятия решений интегрированной автоматизированной системы контроля и управления качеством атмосферного воздуха. В этой же главе рассмотрены методы, модели и методики прогнозирования загрязнения атмосферного воздуха и идентификации источников загрязнения. Предложено использование нейросете-вого подхода для прогнозирования загрязнения атмосферного воздуха и даны теоретические основы построения искусственных нейронных сетей. [c.11]
При создании типовой ИАСУ функциональная структура ПО реализуется различным образом в зависимости от взаимосвязи ИАСУ с другими автоматизированными системами используемых операционных систем необходимости применения имеющихся ППП, обладающих развитыми средствами взаимодействия с пользователями и управления. [c. 299]
299]
Типовые системы АСУ ТП – структура, функции и требования
Технологическое оборудование на промышленных предприятиях может управляться АСУ ТП (автоматизированной системой управления технологическим процессом).
Обычно такие системы устанавливают там, где на выходе получают завершенное изделие, и это может быть весь цех или только часть линии. Поскольку речь идет об автоматизации, то предполагается, что все устройства будут контролироваться человеком, оператором.
Построение системы АСУ ТП предполагает использование следующих связанных блоков: элементы автоматического управления, автоматизированные устройства, пульты управления процессом и программируемые логические контроллеры.
Все это работает в комплексе, и большая часть функций по прохождению технологического процесса возлагается как раз на автоматическую систему, действующую по заданному алгоритму.
Структура систем управления
Считается, что автоматическая система управления техпроцессом — это только один из подвидов в этой категории. Также может быть контроль на уровне предприятия или всей отрасли. Но и сами типовые системы АСУ ТП тоже различаются по структуре:
Также может быть контроль на уровне предприятия или всей отрасли. Но и сами типовые системы АСУ ТП тоже различаются по структуре:
- на нижнем, полевом, уровне располагаются все исполнительные механизмы и сенсоры, датчики;
- на среднем — программируемые логические контроллеры, работающие по такому алгоритму: прием и обработка данных, выдача соответствующих управленческих команд;
- на верхнем производится мониторинг работы, здесь уже привлекается оператор.
- В более широком смысле системы управления и контроля АСУ ТП включают в себя:
- технические средства для получения и передачи информации;
- исполнительные устройства;
- организующие и транслирующие программы, другие элементы программного обеспечения;
- систему хранения справочной, оперативной, технологической информации;
- инструкции для операторов;
- собственно, самих операторов-технологов, которые могут вмешиваться в работу автоматизированной системы и несут за это ответственность.


Функции АСУ ТП
Современные системы АСУ ТП обеспечивают выполнение таких функций:
- Информирование. Производится сбор и обработка данных для контроля за прохождением техпроцесса, происходит контроль технологических параметров на их соответствие, проверяется, не достигнуты ли предельные нормы.
- Управление. На основании полученной информации система принимает решение о корректировке переменных, стабилизации всего процесса. Кроме того, подбирается оптимальный режим функционирования для каждого из участвующих в процессе агрегатов. Все управление оборудованием производится по связанной логической цепочке.
- Распознавание аварийный ситуаций при превышении установленных значений или достижении других «граничных норм». Тем самым обеспечивается общее повышение безопасности предприятия.
- Контроль за правильностью работы оборудования и сбора информации. Для этого используются всевозможные контроллеры и средства диагностики.

Описание функционирования систем АСУ ТП заключается в том, что оператор может управлять процессом дистанционного, со своего пульта, который может быть значительно удален от самого места проведения работ. При этом система будет своевременно предоставлять всю важную информацию и регистрировать контролируемые параметры и происходящие события.
Требования к системам АСУ ТП
Основные требования к таким системам — надежность, безопасность, оперативность срабатывания, простота в использовании.
Ключевыми стандартами, которыми руководствуются при создании этих систем, стоит назвать ГОСТы на информационные технологии — ГОСТ 34.601-90, ГОСТ 34.602-90 и ГОСТ 34. 201-90, а также методические указания с общими положениями РД 50-682-89 и РД 50-680-88.
Все виды систем АСУ ТП могут функционировать только в условиях надлежащей комплексной защиты. Необходима защита на программном и технологическом уровне. Так, нельзя допустить несанкционированный доступ, как и нельзя допустить, чтобы система останавливалась в результате ошибки оператора.
Чтобы обеспечить максимальную безопасность, все комплектующие системы тщательно проверяются. Защита устанавливается с помощью паролей, причем обычно делают два уровня доступа — для оператора и руководителя.
автореферат диссертации по информатике, вычислительной технике и управлению, 05.13.07, диссертация на тему:Технология автоматизированного проектирования технической структуры систем управления тепловых электростанций
Библиография Целищев, Евгений Сергеевич, диссертация по теме Автоматизация технологических процессов и производств (в том числе по отраслям)
1. An Efficient Circuit Card Design Model for 1.formation Technologies. V.B.Lebedev. p. 231-235.
2. E.S. Tselishchev, A.G.Salin, V.V.Sedov, A.V.Kozlov, V.N.Nikol’skii Intelligent Technology for Automated Design of Monitoring and Control Systems// VGB PowerTech.International Journal for Power Plant Technology, Germany, N6,1999, p.33-37.
3. Futura H., Tuk-sand Tao T.P. Structural engineering application of expert system // CAD. 1985. Vol. 17. № 9. P. 410-419.
Futura H., Tuk-sand Tao T.P. Structural engineering application of expert system // CAD. 1985. Vol. 17. № 9. P. 410-419.
4. Heinrich, Koch Rationelle Konstruieren durch metodishe und zielbestimmende Hilfsmittel. In: Int. Konf. INFERT, 1978. Ind Fertigung. Vartr. Fachsert. 1. Dresden. Sl-10.
5. International Journal of General Systems, 5, № 1, 1979. Godnen J.A. and F.J. Varela.
6. International Journal of General Systems, 9, № 1, 1982 Dussauchey R.L.
7. John Miles Smith and Diana C.P. Smith. Database Abstractions. Aggregation and Generalization//ACM Transactions on Database Systems, Vol.2, № 2, June 1977.-pp.105-133.
8. KJCS/Kraftwerk-Kennzeichensystem-Richtlinien und Schlusselteil/ VGB Kraft-werktechnik GmbH, 4. Ausgabe 9/1991.
9. Metodology of the Creation of Machinery as a Basis of Presentation of Knowledge in the CAD-Systems. Y.M. Solomentsev, G.D. Volkova. International Conference. Information Technology in Design. EWITD’94 Proceeding.
10. Minsky M. A Framework for Presenting Knowledge/Ml Memo 306. MIT. June, 1974.
11. Rychmer M.D. Expert system for engineering design // Experts. January 1985. Vol. 2. №1. p. 30-44.
12. Simon H.A. How complex are complex systems? In: PSA 1976, Volume 2, Philosophy of Science Association, East Lansing, Michigan, 1977, pp. 507-522.
13. The Role of IT in Handling the Information Requirements of the Design Team. Stephen I. Culley, Andrew W. Court, Christopher A. Kekahon. International Conference. Information Technology in Design. EWITD’94 Proceeding.
14. VGB Kraftwerktechnik, 1994, №11, s. 810-841.
15. Welfonder E: Leittechnik-Dokumentation aus Betreibersicht/ ETG/VGB-Fachttagung «Betriebsgerechte Dokumentation in Krafwerken? Einfluss der mod-ernen Leittechnik und der Planungsmittel», 12/13/ Juni 1986, Baden-Baden.
16. Автоматизация крупных тепловых электростанций/Под ред. М.П.Шальмана.-М.гЭнергия, 1974.
17. Автоматизация поискового конструирования. (Искуственый интеллект в машинном проектировании) / Под ред. А. И. Половинкина. Радио и связь.-1981.-344 с.
18. Автоматизация проектирования АСУ / А. Г. Мамиконов, А. Д. Цвикрун, В. В. Кульба.-М.: Энергия, 1981.-432 с.
19. Автоматизация проектирования систем управления/Сб.статей.-М. Машиностроение, 1989.
20. Автоматизированная система разработки проектно-сметной документации АСУ ТП (САПРД АСУ ТП). ЦПКБ АСУ, № г.р.01828018926.-М.-1983.
21. Айвазян С.А., Енюков И.С., Мешалкин Л.Д. Прикладная статистика: Основы моделирования и первичная обработка данных.-М.: Финансы и статистика, 1983.-471 с.
22. Айгнер М. Комбинаторная теория.-М.:Мир, 1982.-558 с.
23. Алгебраическая теория автоматов, языков и полугрупп/Пер.с англ., под ред. М.Арбиба.-М.:Статистика, 1975.-335 с.
24. Алгоритмы и программы восстановления зависимостей/Под ред. В .Н.Вапника.-М.: Наука, 1984.-816 с.
25. Алгоритмы оптимизации проектных решений/Под ред. А. И. Половинкина. М.: Энергия.-1976.-264 с.
26. Александров А.Г. Аналитический синтез регуляторов по заданным показателям качества переходных процессов. В кн.: Аналитические методы синтеза регуляторов: Межвуз. Науч сб., вып. 3, Саратов, 1978, с. 21-38.
27. Александров А.Г. Методология построения обеспечения САПР АСУ .-В кн. Программное обеспечение АСУ. Всесоюзная научно-техническая конференция: Тезисы докладов, Калинин, 1983, с. 82-83.
28. Александров А.Г. Теория аналитического синтеза регуляторов многомерных линейных систем. В кн.: Опыт создания и внедрения автоматизированных и автоматических систем управления : Тез. докл. Всесоюзн. Научно-техн. Со-вещан., Фрунзе, 1977, с. 124-126.
29. Анализ задач развития технологии типового проектирования АСУ ТП в САПР. Отчет о НИР. № г.р. 01840057292. М.-1985.-23 с.
30. Апресян Ю.Д. Лексическая семантика.-М.:Наука, 1974.-367 с.
31. АСУ ТП. Теория и технология автоматизированного проектирования/В. И. Скурихин, В.В. Дубровский, В. Б. Шифрин, Н. Г. Бизюк. Киев : Наукова думка, 1988.-284 с.
32. Афифи А., Эйзен С. Статистический анализ. Подход с использованием ЭВМ.-М.: Мир, 1982.-488 с.
33. Ахо А., Ульман Дж. Теория синтаксического анализа и компиляции.-М.: Мир, 1978.- 343 с.
34. Байдун В.В., Бунин А.И. Языки и системы представления знаний.-М.МЭИ, 1994.
35. Беллман Р., Заде JI.A. Вопросы анализа и процедуры принятия решений/Пер. с англ.-М.:Мир, 1976.-215 с.
36. Боровский А.В., Салин А.Г., Турянский И.Л., Целищев Е.С. Автоматизация проектирования комплекса технических средств АСУТП//Сталь, 1989, N5, с. 88-90.
37. Бородулин Ю.Б., Гусев В.А., Кондрашин А.В., Чапцов Р.П. Архитектура и принципы построения базовой системы автоматизированного проектирования объектов электроники и энергетики.-Известия вузов, Электромеханика, 1978, №9, с. 919-922.
38. Бородулин Ю.Б., Кондрашин А.В., Чапцов Р.П. Вопросы методологии разработки базовой системы автоматизированного проектирования для отрасли.-Межвуз. Сб. Автоматизация проектирования в энергетике и электротехнике. Иваново, 1979, с. 3-12.
39. Бусленко И.П. Моделирование сложных систем.-М.:Наука, 1968.-356 с.
40. Бусленко И.П. Моделирование сложных систем.-М.:Наука, 1978.-400 с.
41. Бусленко И.П., Калашников В.В., Коваленко И.Н. Лекции по теории сложных систем. М.:Советское радио, 1973.-440 с.
42. Буч Г. Объектно-ориентированное проектирование с примерами применения/Пер. с англ.;Под ред. Артамошкина А.Н.-М.:Конкорд, 1992.-519 с.
43. Вавилов А.А., Имаев Д.Х. Машинные методы расчета систем управления. Л.:Изд-во ЛГУ, 1981.
44. Гарбарчук В.И. Проблемы автоматизации проектирования и пути их решения .-Киев. :УкрНИИНТИ, 1981.
45. Гинзбург М.Д. Обработка и распознавание сложной графической информации в интегрированной системе автоматизированного проектирования «Сапфир 92″/Управляющие системы и машины, 1995.-№3. с.72-77.
46. Гинзбург М.Д. Разработка современной интерактивной технологии проектирования систем автоматизации технологических процессов/ Автоматизация и современные технологии, 1992. №12. с.10-15.
47. Гинзбург М.Д. Технология проектирования схем систем автоматизации технологических процессов в АРМ «Сапфир 91 «/Управляющие системы и машины, 1992.-№9.-с. 74-79.
48. Горбатов В.А., Кафаров В.В., Павлов П.Г. Логическое управление технологическими процессами.-М.:Энергия, 1978.-272 с.
49. Горбатов В.А., Павлов П.Г., Четвериков В.Н. Логическое управление информационными процессами.-М.:Энергоатомиздат, 1984.-304 с.
50. ГОСТ 24.103-84. Автоматизированные системы. Основные положения, 1985.
51. ГОСТ 21.408-93. Система проектной документации для строительства. Правила выполнения рабочей документации автоматизации технологических процессов. Издательство стандартов, 1995.
52. ГОСТ 24.703-85. Типовые проектные решения в АСУ. Основные положения. Издательство стандартов, 1986.
53. ГОСТ 34.201-89. Информационная технология. Комплекс стандартов на автоматизированные системы. Виды, комплектность и обозначение документов при создании автоматизированных систем, 1991.
54. ГОСТ 24.104-85. Единая система стандартов автоматизированных систем управления. АСУ. Общие требования. Издательство стандартов, 1986.
55. ГОСТ 34.601-90. Информационная технология. Комплекс стандартов на автоматизированные системы. Автоматизированные системы. Стадии разработки. 1991.
56. Гриценко В.И., Поньшин Б.Н. Информационная технология: вопросы развития и применения.-Киев:Наукова думка, 1988.-268 с.
57. Давиденко К.Я. Современное состояние автоматизации проектирования АСУ ТП., М.: Машиностроение, 1985.-65 с.
58. Демидевич Б.П., Марон И.А. Основы вычислительной математики.-М.:Наука, 1966.-664 с.
59. Денисов А.А., Колесников Д.Н. Теория больших систем управления.-Д.:Энергоиздат, 1982.-288 с .
60. Емельянов А.И., Капник О.В. Проектирование систем автоматизации технологических процессов: Справочное пособие по содержанию и оформлению проектов. М.: Энергоатомиздат, 1983.-400 с.
61. Енюков И.С. Метолы, алгоритмы, программы многомерного статистического анализа.-М.: Финансы и статистика, 1986.-232 с.
62. Заде JI.A. Понятие лингвистической переменной и его применение к понятию приближенного решения/Пер.с англ.-М.:Мир, 1976.-165 с.
63. Интеллектуализация ЭВМ/Е.С.Кузин, А.И.Ройтман, И.Б.Фоминых и др.; под.ред. Ю.М.Смирнова.-М.:Высшая школа, 1989.-159 с.
64. Интеллектуальные системы автоматизированного проектирования больших и сверхбольших интегральных микросхем/В.А.Мищенко, Л.М.Городецкий, Л.И.Гурский и др.;Под ред. В.А.Мищенко.-М.:Радио и связь, 1988.-272 с.
65. Информационные объекты ISO 10303/Дмитров В.И., Макаренков Ю.М.//Автоматизация проектирования, 1997, №2.
66. Каста Дж. Большие системы.Связность, сложность и катастрофы/Пер с англ.; Под ред. Ю.П.Гупало и А.А.Пионтковского.-М.:Мир, 1982.-115 с.
67. Керн Г., Керн Т. Справочник по математике.-М.»Наука, 1977.-832 с.
68. Клир Дж. Системология. Автоматизация решения системных задач/Пер. с англ.; Под ред. Горлина А.И.-М.:Радио и связь, 1990.-539 с.
69. Кондрашин А. В. Теория автоматизированных систем управления промышленных предприятий. Учебное пособие.-Иваново:ИвГУ, 1987.-84 с.
70. Кондрашин А.В. Принципы проектирования автоматических систем регулирования для теплоэнергетических установок.-Иваново:Изд ИЭИ, 1975.- 82 с.
71. КТС//Тез.докл. XII научно-мет.семинара по автом.проектир.в энерг.и электр.-Иваново, 1988, с.10-16.
72. Корячко В.П., Курейчик В.М., Норенков И.П. Теоретические основы САПР.-М.:Энергоатомиздат, 1987.-400 с.
73. Кристофер Дж. Методы проекгирования.-М.:Мир,1986.
74. Кучуганов В.Н. Автоматический анализ машиностроительных чертежей. 1985.
75. Литвинов В.В. Математическое обеспечение проектирования вычислительных систем и сетей. Киев: Техника, 1982.-176 с.
76. Литинский Л.Б. Об отыскания глобального максимума в одной задаче автоматической классификации. Автоматика и телемеханика, № 3, 1985, с. 158160.
77. Максименко A.M. Управление проектными и научно-исследовательскими разработками с помощью ЭВМ.-Л.:ЛДНТП, 1986.
78. Малышев Н.Г., Мицук Н.В. Основы оптимального управления процессами автоматизированного проектирования.-М.:Энергоатомиздат, 1990.-223 с.
79. Мамиконов А. Г., Цвикрун А. Д., Кульба В. В. Автоматизация проектиро-ваия АСУ. М.:Энергоиздат, 1981.-328 с.
80. Мандель И.Д. Кластерный анализ.-М.:Финансы и статистика, 1988.-176 с.
81. Мандештам С.М., Соловьев А.Г., Эйдус В.Е. Системные спектры построения унифицированных ИВК.- Приборы и системы управления., №11, 1978, с.1-5.
82. Месарович М., Мако Д., Такахара Я. Теория иерархических многоуровневых систем. М.: Мир, 1973.-343 с.
83. Месарович М., Такахара Я. Общая теория систем: математические основы. М.:Мир, 1978.-312 с.
84. Методы анализа и синтеза структур управляющих систем/Б.Г.Волик, Б.Б.Буянов, Н.ВЛубков и др.:Под ред. Б.Г.Волика.-М.:Энергоатомиздат, 1988.296 с.
85. Методы и алгоритмы автоматизированного проектирования сложных систем управления/Волкович B.JL, Волошин В.Ф., Горлова Т.М. и др.-Киев:Наукова думка, 1984.-216 с.
86. Миркин Б.Г. Анализ качественных признаков.-М.:Статистика, 1976.-166 с.
87. Михалевич B.C., Волкович B.JI. Вычислительные методы исследования и проектирования сложных систем.-М.:Наука, 1982.
88. Моисеев Н.Н. Математические задачи системного анализа.-М.:Наука, 1981.-487 с.
89. Мутушев Д.М., Филиппов В.И. Объектно-ориентированные базы данных. Программирование, 1995, №6, с.59-76.
90. Мухамедгалиев А.Ф., Амиргалиев Е.М. Структурная оптимизация в рамках одной модели классификации.-Алма-Ата: Редколлегия ж. «Вестник А.Н. КазССР». № 5722-85. Деп., 1985.-5 с.
91. Наумов Н.А. Некоторые вопросы структурного проектирования. Перепринт М.: ИПМ АН СССР, вып. 142, 1979.-76 с.
92. Никольский В.Н., Целищев Е.С., Салин А.Г. Прокладка трасс при изготовлении графических документов//Тезисы международной конференции по компьютерной графике «КОГРАФ-96», Н.Новгород, 1996, с. 111-113.
93. Новохатько Ю.А., Целищев Е.С., Салин А.Г. Использование объектно-ориентированного подхода при проектировании фреймовой модели зна-ний/Тез.докл.междунар.научно-техн. конф. VIII Бенардосовские чтения, Иваново, 1997, с. 57-58.
94. Норенков И.П. Введение в автоматизированное проектирование технических устройств и ситем.-М.:Высшая школа, 1980.-311 с.
95. Норенков И.П., Маничев В.Б. Системы автоматизированного проектирования электронной и вычислительной аппаратуры. М.: Высшая школа.-1983.-272 с.
96. О формировании концепций. Концепция «четырех И»./В.И.Скурихин//Управляющие системы и машины, №2, 1989, с.7-12.
97. Общее описание системы автоматизированного проектирования комплекса технических средств локальной автоматики (ДИСПР-КТС)/Кондрашин
98. A.В., Целищев Е.С., Салин А.Г.//Отчет ИЭИ, №ГР0183002692, Иваново, 1984, 55 с.
99. Общеотраслевые руководящие методические материалы по созданию и применению автоматизированных систем управления технологическими процессами в отраслях промышленности (ОРММ-2 АСУ ТП). М.: 1981.-191 с.
100. Объектно-ориентированный подход и интеграция знаний/Дмитров В.И., Макаренков Ю.М.//Автоматизация проектирования, 1997, №2.
101. Оптимизация структур данных в АСУ/А.Г.Мамиконов, А.А.Алымов,
102. B.В.Кульба и др.-М.:Наука, 1988.-256 с.
103. Оре О. Теория графов.-М.:Наука, 1980.-336 с.
104. Основные элементы языка Express/Дмитров В.И., Макаренков Ю.М.//Автоматизация проектирования, 1997, №2.
105. Основы кибернетики. Математические основы кибернетики/Под ред. Пупкова К.А.-М.: Высшая школа, 1974.-416 с.
106. Перегудов Ф.И., Тарасенко Ф.П. Введение в системный анализ.-М.:Высшая школа, 1989.-367 с.
107. Петров Б.Н., Поспелов Г.С. О путях развития больших систем управле-ния.-Изв. АН СССР//Техническая кибернетика, 1966, №2, с. 3-10.
108. Половинкин. А. И. Методы инженерного творчества. Волгоград. : ВПИ, 1984.-366 с.
109. Попов Э.В. Экспертные системы: решение неформализованных задач в диалоге с ЭВМ.-М.:Наука, 1987.-288 с.
110. Попырин Л. С. Математическое моделирование и оптимизация теплоэнергетических установок.-М.’Энергия, 1978.-416 с.
111. Поспелов Д.А. Логико-лингвистические модели в системах управления.-М.:Энергоиздат, 1981.-231 с.
112. Поспелов Г.С., Ириков В.А. Программно-целевое планирование и управление. М.:Сов.радио, 1976.
113. Проектирование систем автоматизации технологических процессов / Клюев А.С., Глазов Б.В., Дубровский А.Х.: Под ред. Клюева А.С.-М.: Энергия, 1980.-512 с.
114. Разработка и внедрение технологической линии автоматизированного проектирования АСУ ТП. Средства телемеханики КИП и А. Техническое задание на разработку САПР КТС АСУ ТП МГ. Отчет о НИР. Харьков, 1986, 40 с.
115. Разработка УИСАПР электротехнических устройств и систем (САПРО ЭТУ). Отчет о НИР. М.: Изд. МЭИ, № г.р, 01830022411, 1984, 64 с.
116. РД50-34-698-90. Комплект стандартов и руководящих документов на автоматизированные системы. Автоматизированные системы. Требования к содержанию документации. Издательство стандартов. 1991.
117. Ротач В.Я. Расчет динамики промышленных систем автоматического ре-гулирования.-М.: Энергия, 1973.-433 с.
118. Салин А.Г., Целищев Е.С. База данных и знаний о приборах и системах управления и ее применение при автоматизации проектирования АСУТШ/Приборы и системы управления, N6, 1997, с.20-22.
119. Салин А.Г., Целищев Е.С. Интегрированная САПР систем контроля и управления и верхнего уровня АСУ ТП//Тез .доел. III Между-нар.электр.науч.техн.конф. Современны проблемы информатизации, Воронеж, 1998, с. 41-42.
120. Салин А.Г., Целищев Е.С. Проектирование систем локальной автоматики на базе диалоговых средств ДИСПР-КТС//Тез.докл. Областной научно-техн.конф.молод.уч.,Иваново, 1986, с.258.
121. Салин А.Г., Целищев Е.С., Елизарова Н.Н. Проектирование офисных систем в рамках агрегативно-декомпозиционных технологий//Современные проблемы информатизации. Тезисы докладов II Республиканской электронной научной конференции. Воронеж, 1997, с.122.
122. Салин А.Г., Целищев Е.С., Косяков С.В. Автоматизация документирования проектных решений на основе графических фреймов// Тезисы международной конференции по компьютерной графике «КОГРАФ-96», Н.Новгород, 1996, с.110-111.
123. САПР систем логического управления/В.А.Горбатов, А.В.Крылов, Н.В.Федоров; под ред. В.А.Горбатова.-М.:Энергоатомиздат, 1988.-237 с.
124. Сигорский В.П. Математический аппарат инженера.-Киев:Техника, 1975.-768 с.
125. Система автоматизированного проектирования комплекса технических средств локальной автоматики ДИСПР-КТС. Госфонд алгоритмов и программ СССР. № г.р. 50850000883.-Калинин, 1984.
126. Системное проектирование средств автоматизации/Емельянов С.В., Кос-тылеваИ.Е. Матич Б.П., Миловидов Н.Н.-М.: Машиностроение, 1978.-190 с.
127. Скурихин В.И., Дубровский В.В., Шифрин В.Б. АСУ ТП. Автоматизация проектирования комплекса средств автоматики.-Киев:Наукова думка, 1981.-343 с.
128. Скурихин В.И., Шифрин В.Б. Конструирование КТС АСУ ТП в САПР из типовых проектных модулей.-В кн.: Автоматизация поискового конструирования и подготовка инженерных кадров. Тезисы докладов Ш-ей всесоюзной конференции, Иваново, ИЭИ,-1983.- с. 14-15.
129. Словарь по кибернетике/Под ред. Глушкова В.М.-Киев, Главная редакция УСЭ, 1979.-623 с.
130. Смирнов О.Л., Падалко С.Н., Пиявский С.А. САПР: формирование и функционирование проектных модулей.-М.Машиностроение, 1987.-272 с.
131. СНИП 1.02.01-85 Инструкция о составе, порядке разработки, согласования и утверждения проектно сметной документации на строительство предприятий, зданий и сооружений.
132. Советов БЛ. Информационная технология.-М.:Высшая школа, 1994.-368 с.
133. Советов БЛ. Теория информации. Теоретические основы передачи информации в АСУ.-Л Ленинградский ун-т., 1977.-184 с.
134. Солодовников В.В., Бирюков В.Ф., Тумаркин В.И. Принцип сложности в теории управления.-М.: Наука, 1977.-342 с.
135. Солодовников В.В., Тумаркин В.И. Теория сложности и проектирование систем управления.-М.:Наука, 1990.-164 с.
136. Справочник проектировщика автоматизированных систем управления технологическими процессами/Под. ред. Г. Л. Смилянского. М. : Машиностроение, 1983.-528 с.
137. Статистические методы для ЭВМ/Под ред. Эйслейна К., Рэлетона Э., Уилфа Г.С. -М.:Наука, 1986.-460 с.
138. Стефани Е. П. Основы построения АСУ ТП.-М.:Энергоиздат, 1982.-352 с.
139. Суворов Г.Г. Синтез структуры технических объектов на основе модели базы знаний//Сб. науч. трудов № 127.-М.: Изд. МЭИ, 1987.- с.40-49.
140. Суворов Г.Г., Суворова Л.Г. Моделирования процесса принятия решений в структурном проектировании. В кн. Труды ИЭИ, вып. 24.-М.: Изд. ИЭИ, 1984.-е. 35-39.
141. Тверской Ю.С. Автоматизация котлов с пылесистемами прямого вдува-ния.-М:Энергоатомиздат, 1996.-256 с.
142. Техническое задание на разработку САПР АСУ ТП ТЭС и АЭС 197001.042009.02977.020 АПОО. М., 1980.-62 с.
143. Технология параллельного проектирования: основные принципы и проблемы внедрения/Смирнов А.В., Юсупов Р.М.//Автоматизация проектирования, 1997, №2.
144. Технология проектирования систем локальной автоматики в АСУТП на базе диалоговых средств ДИСПР-КТС//Кондрашин А.В., Белов А.А., Целищев Е.С., Салин А.Г// Отчет ИЭИ, №ГР01820030003, Иваново, 1985.-60 с.
145. Технология проектирования технической структуры АСУТП на базе системы САПР-СТО/ Кондрашин А.В., Баллод Б.А., Целищев Е.С. и др.// Отчет ИЭИ, №ГР0185003692, Иваново, 1986.-64 с.
146. Тимченко А.А., Родионов А.А. Основы информатики системного проектирования объектов новой техники.-Киев:Наукова думка, 1991.-152 с.
147. Тищенко Н.М. Введение в проектирование систем управления.-М.:Энергоатомиздат, 1986.-248 с.
148. Ту Дж., Гонсалес Р. Принципы распознавания образов: Пер с англ./Под ред. Журавлева Ю.И.-М.: Мир, 1978.-412 с.
149. Уайт П. Управление исследованиями и разработками:Пер.с англ./Под ред.Д.Н.Бобрышева. М.:Экономика, 1982.
150. Урсул А.Д. Информация. Методологические аспекты.-М.:Наука, 1971.
151. Филиппов В.И. Обобщенная модель данных и ее реализация. Программное обеспечение информационных систем. М.:Наука, 1989.-103 с.
152. Фомин Я.А., Тарловский Г.Р. Статистическая теория распознавания образов. — М.: Радио и связь, 1986.-264 с.
153. Формализация задачи декомпозиции при исследовании многосвязных систем. Харьков В.И. //сб.науч.трудов № 373. М.: МЭИ, 1977, с. 82-85.
154. Формирование и печать функциональных схем автоматического регулирования АСУ ТП. Описание применения. 11008051. М.: МЭИ, 1984.-64 с.
155. Фу К. Структурные методы распознавания образов: Пер. с англ./Под ред. Айзермана М.А.-М.: Наука, 1977.-319 с.
156. Фуку нага К. Введение в статистическую теорию распознавания образов: Пер. с англ./Под ред. Дорофеюка А.А.-М.:Наука, 1979.-367 с.
157. Харари Ф. Теория графов.-М.:Мир, 1973.-300 с.
158. Хорошевский В.Ф. PIES технология и инструментарий PIES WorkBench для разработки систем и основных характеристик.(обзор). Новости искусственного интеллекта, 1995, №2.
159. Цвиркун А.Д. Основы синтеза структуры сложный систем.-М.:Наука, 1982.-200 с.
160. Целищев Е.С., Кондрашин А.В. Интеграция разнородных программных средств при разработке комплексной САПР АСУТП металлургических пред-приятий//Тез.докл НТС по теории и практике интегрированных САПР, Челябинск, 1988, с.35-36.
161. Целищев Е.С., Мошкарин А.В., Салин А.Г., и др. Технология проектирования тепловых электростанций и методы ее компьютеризации.-М.:Энергоатомиздат, 1997.-234 с.
162. Целищев Е.С., Салин А.Г. Автоматизация документирования табличных форм при проектировании систем управления//Современные проблемы информатизации. Тезисы докладов II Республиканской электронной научной конференции. Воронеж, 1997, с.46.
163. Целищев Е.С., Салин А.Г. Автоматизация проектных процедур монтажной части систем контроля и управления ТЭС//Повышение эффективности работы ТЭС и энергосистем. Труды ИГЭУ. Выпуск I. Иваново, 1997, с.219-222.
164. Целищев Е.С., Салин А.Г. Агрегативно-декомпозиционная технология синтеза структурно-сложных технических систем//Автоматизация и современные технологии, N6, 1997, с.13-17.
165. Целищев Е.С., Салин А.Г. Агрегативно-декомпозиционная технология автоматизации проектирования систем контроля и управления//Управление в технических системах. Материалы науч.-техн.конф., Ковров, 1998, с.88-89.
166. Целищев Е.С., Салин А.Г. Инструментальные средства обеспечения диалога при создании САПР АСУТП//Системы автоматизир.проектирован. и обучения, Иваново, 1987, с.76.
167. Целищев Е.С., Салин А.Г. Использование агрегативно-декомпозиционной технологии при автоматизированной разработке смет на монтаж оборудования в части//Управление в технических системах. Материалы науч.-техн.конф., Ковров, 1998, с.90.
168. Целищев Е.С., Салин А.Г. К вопросу о формировании технического задания при проектировании СКУ в рамках АДТ-технологии//Повышение эффективности работы ТЭС и энергосистем. Труды ИГЭУ. Выпуск II. Иваново, 1998,с.231-235.
169. Целищев Е.С., Салин А.Г. Многошаговая автоматизация принятия решений при проектировании сложных систем/УТез.доел. III Между-нар.электр.науч.техн.конф. Современны проблемы информатизации, Воронеж, 1998, с. 41-42.
170. Целищев Е.С., Салин А.Г. Новый подход развития САПР в проектных институтах энергетического профиля//Управление в технических системах. Материалы науч.-техн.конф., Ковров, 1998, с.85-87.
171. Целищев Е.С., Салин А.Г. О новом подходе к автоматизации проектирования систем контроля и управления ТЭС//Повышение эффективности работы ТЭС и энергосистем. Труды ИГЭУ. Выпуск I. Иваново, 1997, с.215-218.
172. Целищев Е.С., Салин А.Г. Построение единой модели проекта системы управления на основе фреймов//Тезисы международной конференции «Современное состояние, проблемы и перспективы развития российской экономики. Кондратьевские чтения», 1996, с. 142-144.
173. Целищев Е.С., Салин А.Г. Система автоматизированного проектирования структур технического обеспечения АСУТП (САПР-СТО)//Тез.докл. III областной научно-техн. конф. молодых ученых, Иваново, 1988, с.23.
174. Целищев Е.С., Салин А.Г., Елизарова Н.Н. Опыт проектирования офисных систем в рамках агрегативно-декомпозиционных технологий//Создание и развитие информационной Среды вуза: состояние и перспективы. Сборник статей к конференции. Иваново. 1997, с.34.
175. Целищев Е.С., Салин А.Г., Елизарова Н.Н. Сквозная автоматизация проектирования систем контроля и управления//Современные проблемы информатизации. Тезисы докладов II Республиканской электронной научной конференции. Воронеж, 1997, с.98.
176. Целищев Е.С., Салин А.Г., Козлов С.А., Никольский Н.В. Опыт применения АДТ-технологии автоматизированного проектирования систем контроля и управления ТЭС//Теплоэнергетика, N2, 1999, с.40-43.
177. Целищев Е.С., Салин А.Г., Мошкарин А.В., Сандлер Н.М. Разработка агрегативно-декомпозиционный метода автоматизированного проектирования сложных систем ТЭС на основе фреймовой сети//Депон.ВИНИТИ, 04.10.99., N2981-B99,23 с.
178. Целищев Е.С., Салин А.Г., Никольский В.Н. Интеллектуальная технология автоматизированного проектирования систем контроля и управле-ния//Управляющие системы и машины, N6, 1998, с.27-35.
179. Целищев Е.С., Салин А.Г., Никольский Н.В. Агрегативно-декомпозиционная технология автоматизированного проектирования систем контроля и управления ТЭС//Теплоэнергетика, 1997, N10, с.38-42.
180. Целищев Е.С., Салин А.Г., Сандлер Н.М., Козлов А.В. К вопросу о концепции развития САПР в проектных организациях энергетического профиля// Информационные технологии моделирования и управления. Межвуз. сб. науч. тр., Воронеж, 1998, с.42-46.
181. Целищев Е.С., Салин А.Г., Никольский Н.В., Сандлер Н.М. Использование агрегативно-декомпозиционной технологии при проектировании систем контроля и управления//Управляющие системы и машины, 1999, N5, с. 92-95.
182. Целищев Е.С., Салин А.Г., Шемякин А.Н. Автоматизация проектирования монтажной части систем контроля и управления//Системы управления и информационные технологии. Межвуз.сб.науч.тр.,Воронеж,1998,с.136-141.
183. Целищев Е.С., Сандлер Н.М. Информационные аспекты агрегативно-декомпозиционного синтеза структуры системы//Депон.ВИНИТИ, 04.10.99., N2980-B99, 11 с.
184. Целищев Е.С., Сандлер Н.М. К вопросу о концепции САПР проектного института// Энергосбережение, N3, 1999, с.72-78.
185. Целищев Е.С., Сандлер Н.М., Янко Г.В. Классификация структур управления арматурой и ее использование в автоматизации проектирования // Де-п он .ВИНИТИ, 19.01.2000., № 108-В00, 16 с.
186. Чапцов Р.П., Мельников А.В., Афанасьев А.И., Диалоговая система автоматизированного проектирования технических структур АСУ ТП.-М.:МВТУ, 1984.-357 с.
187. Черняк Ю. И. Системный анализ в управлении экономикой. М. : Экономика, 1975.-192 с.
188. Четвериков В.Н., Ревунков Г.И., Самохвалов Э.Н. Базы и банки данных.-М.:Высшая школа, 1987.
189. Чичварин Н.В. Экспертные компоненты САПР.-М.Машиностроение, 1991.-240 с.
190. Что мешает внедрению АСУТП?//Теплоэнергетика. N4. 1989, с.72-77.
191. Что мешает внедрению АСУТП?/Фельдман В.Г.//Теплоэнергетика. N5. 1990, с.65-66.
192. Шаров А.А. Биосемиотика: функционально-эволюционных подход к анализу смысла информации. НТИ. Сер. 2. Информационные процессы и системы. 1990 № 12.
193. Шемякин А.Н., Целищев Е.С., Салин А.Г. Фреймовая модель представления знаний предметной области АСУТП/Тез.докл.междунар.научно-техн. конф. VIII Бенардосовские чтения, Иваново, 1997, с. 56.
194. Шеннон К. Работы по теории информации и кибернетике/Под ред. Р.Л.Добрушина, О.Б.Лупанова.-М.:Иностр.лит-ра,1963.-830 с.
195. Шестихин О.Ф., Энгель Р.В. Машинные методы проектирования систем автоматического управления. — Л.: Машиностроение, 1973.-236 с.
196. Энкарначо Ж., Шлехтендаль Э. Автоматизированное проектирование. Основные понятия и архитектура систем. :Пер.с англ.М:Радио и связь, 1986.
197. Энциклопедия кибернетики. Киев:Главная редакция украинской советской энциклопедии. 1974, т.1,608 е.; т.2, 624 с.
198. Эппггейн В.Л., Сенечкин В.И. Языковые средства АРИУС.-М.: Институт проблем управления, 1976, 56 с.
Основы системы управления| Ledin Engineering, Inc.
Взято из встроенных систем управления на C / C ++
Система управления (также называемая контроллером) управляет работой системы таким образом, чтобы реакция системы приблизительно соответствовала заданному поведению. Типичным примером системы управления является круиз-контроль в автомобиле: круиз-контроль управляет настройкой дроссельной заслонки таким образом, чтобы скорость автомобиля соответствовала заданной скорости, предоставленной водителем.
В прошлом механические или электрические компоненты оборудования выполняли большинство функций управления в технологических системах.Когда аппаратных решений было недостаточно, требовалось постоянное участие человека в контуре управления.
В современных конструкциях систем встроенные процессоры взяли на себя многие функции управления. Хорошо спроектированный встроенный контроллер может обеспечить отличную производительность системы в самых разных условиях эксплуатации. Чтобы обеспечить неизменно высокий уровень производительности и надежности, встроенная система управления должна быть тщательно спроектирована и тщательно протестирована.
В этой книге поэтапно представлен ряд методов проектирования систем управления и определены ситуации, в которых применение каждого из них целесообразно.Он также охватывает процесс реализации проекта системы управления на C или C ++ во встроенной системе с ограниченными ресурсами. Также описаны некоторые полезные подходы для тщательного тестирования проектов систем управления.
Нет никаких предположений о предыдущем опыте разработки систем управления. Использование математики будет сведено к минимуму, а объяснения математически сложных вопросов появятся в разделах, заключенных в рамку. Рекомендуется изучить эти разделы, но это не требуется для понимания оставшейся части книги.Основное внимание уделяется представлению процедур проектирования и тестирования систем управления в формате, позволяющем сразу же их использовать.
В этой главе вводятся фундаментальные концепции проектирования систем управления и описываются этапы проектирования и тестирования контроллера. В нем вводится терминология проектирования систем управления и показано, как интерпретировать представления систем на блок-схемах.
Многие методы проектирования систем управления основаны на математических манипуляциях с моделями систем.Самый простой способ применить эти методы — использовать хороший программный пакет для проектирования систем управления, такой как MATLAB® Control System Toolbox. MATLAB и связанные продукты, такие как Simulink® и Control System Toolbox, используются в последующих главах для разработки моделей системы и применения методов проектирования систем управления.
На протяжении всей книги слова и фразы, встречающиеся в Глоссарии, при первом появлении выделяются курсивом.
Прочитав эту главу, вы сможете:
- Опишите основные принципы работы систем управления с обратной связью.
- Признать важные характеристики предприятия (системы, подлежащей управлению), поскольку они связаны с проектированием системы управления.
- Опишите два основных шага в проектировании системы управления: выбор структуры контроллера и спецификация параметров.
- Разработать технические характеристики системы управления.
- Разберитесь в концепции стабильности системы.
- Опишите основные этапы тестирования проекта системы управления.
Цель контроллера — перевести систему из начального состояния в желаемое и, оказавшись там, поддерживать желаемое состояние.Для круиз-контроля, упомянутого ранее, начальным условием является скорость автомобиля в момент включения круиз-контроля. Желаемое состояние — это установка скорости, предоставляемая водителем. Разница между желаемым и фактическим состоянием называется сигналом ошибки. Также возможно, что желаемое состояние со временем изменится. Когда это происходит, контроллер должен настроить состояние системы, чтобы отслеживать изменения в желаемом состоянии.
Система управления, которая пытается поддерживать выходной сигнал на постоянном уровне в течение длительных периодов времени, называется регулятором.В регуляторе желаемое выходное значение называется уставкой. Система управления, которая пытается отслеживать часто изменяющийся (возможно, непрерывно) входной сигнал, называется сервомеханизмом.
Некоторые примеры помогут прояснить элементы системы управления в знакомых системах. Системы управления обычно имеют датчик, который измеряет выходной сигнал, которым необходимо управлять, и исполнительный механизм, который изменяет состояние системы таким образом, чтобы влиять на выходной сигнал. Как показано в Таблице 1.1, многие системы управления реализованы с использованием простого измерительного оборудования, которое включает и выключает исполнительный механизм, например, клапан.
Система | Датчик | Привод |
Система отопления дома | Датчик температуры | Выключатель печи |
Контроль температуры автомобильного двигателя | Термостат | Термостат |
Регулятор уровня воды в бачке унитаза | Поплавок | Клапан с поплавком |
Таблица 1.1 Некоторые общие системы управления
Системы, показанные в таблице 1.1, являются одними из самых простых приложений систем управления. Более сложные системы управления появляются в автомобильной, аэрокосмической, химической промышленности и во многих других областях. Эта книга посвящена разработке и внедрению систем управления в сложных приложениях.
Сравнение управления разомкнутым контуром и управлением с обратной связью
Во многих конструкциях систем управления можно использовать либо управление разомкнутым контуром, либо управление с обратной связью.Системы управления с обратной связью измеряют контролируемый системный параметр и используют эту информацию для определения управляющего сигнала исполнительного механизма. Системы с разомкнутым контуром не используют обратную связь. Все системы, описанные в таблице 1.1, используют управление с обратной связью. Пример ниже демонстрирует, почему управление с обратной связью является почти универсальным выбором для приложений систем управления.
Рассмотрим систему отопления дома, состоящую из печи и контроллера, который включает и выключает печь, чтобы поддерживать желаемую температуру в помещении.Давайте посмотрим, как этот тип контроллера может быть реализован с использованием управления разомкнутым контуром и управления с обратной связью.
Управление разомкнутым контуром: Для данной комбинации температуры наружного воздуха и желаемой температуры в помещении можно экспериментально определить отношение времени включения печи к времени выключения, которое поддерживает желаемую температуру в помещении. Предположим, что повторяющийся цикл, состоящий из 5 минут включения печи и 10 минут выключения печи, обеспечивает желаемую внутреннюю температуру для определенной наружной температуры.Контроллер разомкнутого цикла, реализующий этот алгоритм, будет давать желаемые результаты только до тех пор, пока система и среда остаются неизменными. Если температура наружного воздуха изменится или поток воздуха в печи изменится из-за замены воздушного фильтра, желаемая температура в помещении больше не будет поддерживаться. Это явно неудовлетворительный дизайн.
Управление с обратной связью: Контроллер с обратной связью для этой системы измеряет температуру в помещении и включает печь, когда температура падает ниже порога включения.Контроллер отключает печь, когда температура достигает более высокого порога отключения. Пороговые температуры устанавливаются немного выше и ниже желаемой температуры, чтобы печь не включалась и выключалась быстро. Этот контроллер автоматически адаптируется к изменениям наружной температуры и к изменениям параметров системы, таких как воздушный поток.
Эта книга посвящена системам управления, использующим обратную связь. Это связано с тем, что контроллеры с обратной связью, как правило, обеспечивают более высокую производительность системы по сравнению с контроллерами разомкнутого контура.
Хотя можно разработать очень простые системы управления с обратной связью методом проб и ошибок, для более сложных приложений единственный возможный подход — это применение методов проектирования, которые были проверены временем. В этой книге рассматривается ряд методов проектирования систем управления и показано, как их применять напрямую. Акцент делается на понимании входных данных и результатов каждого метода, не требуя глубокого понимания математической основы метода.
По мере расширения приложений встроенных вычислений все большее количество функций контроллера перемещается в программную реализацию.Для работы в качестве контроллера обратной связи встроенный процессор использует один или несколько датчиков для измерения состояния системы и управляет одним или несколькими исполнительными механизмами, которые изменяют состояние системы. Измерения датчика являются входными данными для алгоритма управления, который вычисляет команды исполнительного механизма. Процесс проектирования системы управления включает в себя разработку алгоритма управления и его реализацию в программном обеспечении, а также связанные с этим вопросы, такие как выбор датчиков, исполнительных механизмов и частоты дискретизации.
Методы проектирования, описанные в этой книге, могут быть использованы для разработки контроллеров механического и электрического оборудования, а также программных реализаций контроллеров.Этот подход позволяет отложить решение о том, реализовывать ли алгоритм управления в аппаратном или программном обеспечении, до тех пор, пока не будет завершена его первоначальная разработка.
В контексте систем управления завод — это управляемая система. С точки зрения контроллера, объект имеет один или несколько выходов и один или несколько входов. Датчики измеряют производительность установки, а исполнительные механизмы управляют вводом. Поведение самого растения может варьироваться от тривиально простого до чрезвычайно сложного.В начале проекта разработки системы управления полезно определить ряд характеристик установки, имеющих отношение к процессу проектирования.
Линейные и нелинейные системы
Линейная модель объекта требуется для некоторых методов проектирования систем управления, описанных в следующих главах. Проще говоря, линейная система производит выход, пропорциональный ее входу. Небольшие изменения входного сигнала приводят к небольшим изменениям выходного. Большие изменения на входе вызывают большие изменения на выходе.По-настоящему линейная система должна пропорционально реагировать на любой входной сигнал, независимо от его величины. Обратите внимание, что эта пропорциональность также может быть отрицательной: положительный входной сигнал может давать пропорциональный отрицательный выход.
Определение линейной системы
Рассмотрим объект с одним входом и одним выходом. Предположим, вы запускаете систему в течение некоторого времени при записи входных и выходных сигналов. Вызовите входной сигнал u 1 (t) и выходной сигнал y 1 (t) .Проведите этот эксперимент еще раз с другим входным сигналом. Назовите входной и выходной сигналы из этого прогона u 2 (t) и y 2 (t) соответственно. Теперь выполните третий запуск эксперимента с входным сигналом u 3 (t) = u 1 (t) + u 2 (t) .
Объект является линейным, если выходной сигнал y 3 (t) = y 1 (t) + y 2 (t) для любых произвольно выбранных входных сигналов u 1 (t) и у 2 (т) .
Реальные системы никогда не бывают строго линейными. Всегда существуют различные факторы, которые вносят нелинейность в реакцию системы. Например, некоторые нелинейности автомобильного круиз-контроля, о которых говорилось ранее, следующие:
- Сила сопротивления воздуха транспортному средству пропорциональна квадрату его скорости в воздухе.
- Трение (нелинейный эффект) существует внутри трансмиссии, а также между шинами и дорогой.
- Скорость автомобиля ограничена диапазоном от минимального до максимального значений.
Однако линейная идеализация чрезвычайно полезна как инструмент для системного анализа и проектирования систем управления. Некоторые методы проектирования, описанные в следующих главах, требуют линейной модели объекта. Сразу возникает вопрос: если у вас нет линейной модели вашего завода, как ее получить?
Подход, который обычно преподается на инженерных курсах, заключается в разработке набора математических уравнений, основанных на законах физики, применительно к работе установки.Эти уравнения часто являются нелинейными, и в этом случае необходимо выполнить дополнительные шаги для их линеаризации. Эта процедура требует глубоких знаний о поведении растений, а также сильной математической подготовки.
В этой книге мы не предполагаем такой фон. Наше внимание сосредоточено на более простых методах получения линейной модели объекта. Например, если вам нужна линейная модель завода, но вы не хотите ее разрабатывать, вы всегда можете позволить кому-то другому сделать это за вас. Линейные модели предприятия иногда можно получить из технических паспортов системы или по запросу экспертов, знакомых с математикой конкретного типа установки.Другой подход заключается в поиске в литературе линейных моделей растений, подобных интересующей.
Идентификация системы является альтернативой, если ни один из вышеперечисленных подходов не подходит. Идентификация системы — это метод для выполнения полуавтоматической разработки линейной модели предприятия. В этом подходе используются записанные входные сигналы предприятия и данные выходных сигналов для разработки линейной модели системы, которая наилучшим образом соответствует входным и выходным данным. Идентификация системы обсуждается далее в главе 3.
Моделирование — это еще один метод разработки линейной модели объекта. Вы можете разработать нелинейное моделирование вашего предприятия с помощью такого инструмента, как Simulink, и вывести линейную модель объекта на основе моделирования. Мы применим этот подход в некоторых примерах, представленных в следующих главах.
Возможно, вы просто не хотите тратить усилия на разработку линейной модели завода. При отсутствии модели объекта необходимо использовать итеративную процедуру для определения подходящей структуры контроллера и значений параметров.В главе 2 обсуждаются процедуры применения и настройки ПИД-регуляторов. Настройка ПИД-регулятора осуществляется по результатам экспериментов, проведенных на системе «установка плюс регулятор».
Время задержки
Иногда линейная модель точно представляет поведение объекта, но существует временная задержка между входом исполнительного механизма и началом реакции объекта на вход. Это не относится к медлительности реакции растения. Задержка по времени существует только тогда, когда в течение некоторого интервала времени после изменения входного сигнала установки нет абсолютно никакой реакции.
Например, временная задержка возникает при регулировании температуры душа. Изменение положения клапана горячей или холодной воды не дает немедленных результатов. Имеется задержка, пока вода с заданной температурой течет вверх в душевую лейку, а затем в душевую насадку. Только в этом случае существует обратная связь, указывающая на необходимость дальнейшей регулировки температуры.
Многие промышленные процессы имеют временные задержки. Методы проектирования систем управления, основанные на линейных моделях объекта, не могут работать напрямую с временными задержками, но можно расширить линейную модель объекта для моделирования эффектов временной задержки.Результирующая модель также является линейной и отражает приблизительные эффекты временной задержки. Методы проектирования линейных систем управления применимы к расширенной модели объекта. Временные задержки будут обсуждаться далее в главе 3.
Системы с непрерывным и дискретным временем
Система непрерывного времени имеет выходы со значениями, определенными во все моменты времени. Выходы системы с дискретным временем обновляются или используются только в дискретные моменты времени. Растения реального мира обычно лучше всего представлены как системы непрерывного времени.Другими словами, эти системы имеют измеряемые параметры, такие как скорость, температура, вес и т. Д., Определенные во все моменты времени.
Системы с дискретным временем, представляющие интерес в этой книге, — это встроенные процессоры и связанные с ними устройства ввода / вывода (I / O). Встроенная вычислительная система измеряет свои входные данные и производит выходные данные в дискретные моменты времени. Встроенное программное обеспечение обычно работает с фиксированной частотой дискретизации, что приводит к обновлению устройств ввода и вывода через равные промежутки времени.
Ввод-вывод между системами с дискретным временем и системами с непрерывным временем
Класс устройств ввода / вывода обеспечивает взаимодействие встроенных контроллеров дискретного времени с объектами непрерывного действия путем выполнения прямого преобразования между аналоговыми напряжениями и значениями цифровых данных, используемых в процессоре. Аналого-цифровой преобразователь (АЦП) выполняет ввод от аналогового датчика объекта во встроенный компьютер с дискретным временем. После получения команды преобразования АЦП производит выборку своего аналогового входного напряжения и преобразует его в квантованное цифровое значение.Поведение аналогового входного сигнала между выборками неизвестно встроенному процессору.
Цифро-аналоговый преобразователь (ЦАП) преобразует квантованное цифровое значение в аналоговое напряжение, которое приводит в действие аналоговый исполнительный механизм установки. Выходной сигнал ЦАП остается постоянным до тех пор, пока он не будет обновлен на следующей итерации алгоритма управления.
Существует два основных подхода к разработке алгоритмов управления, которые работают как системы с дискретным временем. Первый — выполнить проектирование полностью в дискретной временной области.Для методов проектирования, требующих линейной модели объекта, этот метод требует преобразования модели объекта с непрерывным временем в эквивалент с дискретным временем. Одним из недостатков этого подхода является то, что необходимо указать частоту дискретизации контроллера дискретного времени в самом начале процесса проектирования. Если частота дискретизации изменяется, все шаги в процессе разработки алгоритма управления должны быть повторены, чтобы компенсировать это изменение.
Альтернативная процедура — выполнить проектирование системы управления в области непрерывного времени с последующим заключительным этапом преобразования алгоритма управления в представление дискретного времени.При использовании этого метода изменения частоты дискретизации требуют повторения только последнего шага. Еще одно преимущество этого подхода состоит в том, что алгоритм непрерывного управления может быть реализован непосредственно в аналоговом оборудовании, если это окажется лучшим решением для конкретной конструкции. Последним преимуществом этого подхода является то, что методы проектирования систем управления имеют тенденцию быть более интуитивными в области непрерывного времени, чем в области дискретного времени.
По этим причинам методы проектирования, описанные в этой книге, будут основаны на непрерывной временной области.В главе 8 будет обсуждаться преобразование алгоритма управления с непрерывным временем в реализацию во встроенном процессоре с дискретным временем с использованием языков программирования C / C ++.
Количество входов и выходов
Простейшая система управления с обратной связью имеет один вход и один выход и называется системой «один вход — один выход» (SISO). В системе SISO датчик измеряет один сигнал, а контроллер выдает один сигнал для управления исполнительным механизмом. Все процедуры проектирования в этой книге применимы к системам SISO.
Системы управления с более чем одним входом или выходом называются системами MIMO, что означает системы с несколькими входами и несколькими выходами. Из-за дополнительной сложности доступно меньше процедур проектирования систем MIMO. Только размещение полюсов и оптимальные методы проектирования управления (описанные в главах 5 и 6) непосредственно подходят для систем MIMO. В главе 7 рассматриваются вопросы, относящиеся к проектированию системы управления MIMO.
Во многих случаях системы MIMO можно разделить на несколько приблизительно эквивалентных систем SISO.Например, управление самолетом требует одновременной работы нескольких независимых поверхностей управления, включая руль направления, элероны и руль высоты. Очевидно, что это система MIMO, но сосредоточение внимания на конкретном аспекте поведения может привести к созданию системы SISO для целей проектирования системы управления. Например, предположим, что самолет летит прямо и горизонтально и должен поддерживать желаемую высоту. Система SISO для контроля высоты использует измеренную высоту в качестве входных данных и заданное положение лифта в качестве выходных данных.В этой ситуации измеряемый параметр и контролируемый параметр напрямую связаны и практически не взаимодействуют с другими аспектами управления системой.
Критическим фактором, определяющим, подходит ли система MIMO для разложения на несколько систем SISO, является степень связи между входами и выходами. Если изменения на входе конкретного объекта приводят к значительным изменениям только одного из его выходов, вероятно, разумно представить поведение этой пары входных-выходных сигналов как систему SISO.Когда использование этого метода уместно, все подходы к проектированию системы управления SISO становятся доступными для использования с системой.
Однако, когда существует слишком большая связь между входом объекта и множеством выходов, нет альтернативы, кроме как выполнить проектирование системы управления с использованием метода MIMO. Даже в системах со слабой перекрестной связью использование процедуры проектирования MIMO обычно дает лучший дизайн по сравнению с множеством разработанных проектов SISO, предполагающих отсутствие перекрестной связи между парами входных и выходных сигналов.
Два основных шага в разработке контроллера:
- Укажите структуру контроллера.
- Определите значение проектных параметров в этой конструкции.
Структура контроллера определяет входы, выходы и математическую форму алгоритма управления. Каждая структура контроллера содержит один или несколько регулируемых проектных параметров. Учитывая структуру контроллера, разработчик системы управления должен выбрать значение для каждого параметра, чтобы вся система (состоящая из установки и контроллера) удовлетворяла требованиям к производительности.
Например, в методе корневого годографа, описанном в главе 4, структура контроллера может генерировать сигнал исполнительного механизма, вычисленный как константа (называемая усилением), умноженная на сигнал ошибки. Регулируемым параметром в этом случае является значение усиления.
Как и инженерное проектирование в других областях, проектирование систем управления обычно является итеративным процессом. Во время начальной итерации дизайна контроллера лучше всего начать с простейшей структуры контроллера, которая могла бы обеспечить адекватную производительность.Затем, используя один или несколько методов проектирования, описанных в следующих главах, разработчик пытается определить значения параметров контроллера, которые приводят к приемлемой производительности системы.
Может оказаться, что никакая комбинация значений параметров для данной структуры контроллера не приводит к удовлетворительной работе. Когда это происходит, необходимо каким-то образом изменить структуру контроллера, чтобы обеспечить достижение целей производительности. Затем проектировщик определяет значения регулируемых параметров новой конструкции.Цикл модификации структуры контроллера и выбора проектных параметров повторяется до тех пор, пока не будет получен окончательный проект с приемлемыми характеристиками системы.
Следующие главы содержат несколько примеров, демонстрирующих применение этой двухэтапной процедуры с использованием различных методов проектирования систем управления. Примеры взяты из инженерных областей, где регулярно применяются системы управления. Изучение шагов в каждом примере поможет вам понять, как выбрать подходящую структуру контроллера.Для некоторых методов проектирования определение значений проектных параметров представляет собой автоматизированный процесс с использованием программного обеспечения для проектирования систем управления. Для других методов проектирования необходимо выполнить соответствующие шаги, чтобы выбрать значения для параметров проекта.
После каждой итерации двухэтапной процедуры проектирования необходимо оценить получившийся контроллер, чтобы убедиться, что он соответствует требованиям к производительности. В главе 9 рассматриваются методы тестирования проектов систем управления, включая тестирование с помощью моделирования и тесты контроллера, работающего в сочетании с реальной установкой.
Блок-схема установки и контроллера — это графическое средство для представления структуры конструкции контроллера и его взаимодействия с установкой. На рисунке 1.1 представлена блок-схема элементарной системы управления с обратной связью. Каждый блок на рисунке представляет собой компонент системы. Сплошные линии со стрелками указывают поток сигналов между компонентами.
Рисунок 1.1 Структурная схема системы управления с обратной связью
На блок-схемах систем SISO сплошная линия представляет один скалярный сигнал.В системах MIMO одна линия может представлять несколько сигналов. Круг на рисунке представляет собой суммирующее соединение, которое объединяет свои входные данные путем сложения или вычитания в зависимости от знаков + и — рядом с каждым входом.
Пунктирная рамка на рис. 1.1 — это компоненты системы управления. Входами контроллера являются вход задания (также называемый уставкой) и выходной сигнал установки (измеренный датчиком), который используется в качестве обратной связи. Выход контроллера — это сигнал исполнительного механизма, который приводит в действие установку.
Блок на диаграмме может представлять что-то столь же простое, как постоянное значение, умножающее вход блока, или столь же сложное, как нелинейная система без известного математического представления. Методы проектирования в главе 2 не требуют модели блока завода на рис. 1.1, но методы, описанные в последующих главах, потребуют линейной модели завода.
Алгебра блок-схем линейной системы
Можно манипулировать блок-схемами, содержащими только линейные компоненты, для получения компактных математических выражений, представляющих поведение системы.Цель этой манипуляции — определить выходной сигнал системы как функцию его входа. Выражение, полученное в результате этого упражнения, полезно в различных процедурах анализа и проектирования систем управления.
Каждый блок на схеме должен представлять линейную систему, выраженную в форме передаточной функции. Передаточные функции представлены в главе 3. Знание деталей передаточных функций не требуется для выполнения алгебры блок-схем.
На рис. 1.2 представлена блок-схема простой системы управления с линейной обратной связью.Символы нижнего регистра обозначают сигналы в этой системе.
- r — это вход задания, также называемый уставкой.
- e — сигнал ошибки, вычисляемый путем вычитания измерения датчика из опорного входа.
- y — это выходной сигнал системы, который измеряется и используется в качестве сигнала обратной связи.
Блоки на схеме представляют линейные компоненты системы. Каждый блок может представлять динамическое поведение любой степени сложности, если выполняется требование линейности.
- G c — алгоритм линейного регулятора.
- G p — это линейная модель объекта (включая динамику привода).
- H — это линейная модель датчика, которую можно смоделировать как константу, например 1, если динамикой датчика можно пренебречь.
Рисунок 1.2 Система управления с линейной обратной связью.
Основное правило алгебры блок-схем гласит, что выход блока равен входу блока, умноженному на передаточную функцию блока.Применение этого правила дважды приводит к формуле. 1.1. Проще говоря, уравнение. 1.1 говорит, что выходной сигнал системы y является сигналом ошибки e , умноженным на передаточную функцию контроллера G c , а затем снова умноженным на передаточную функцию объекта G p .
(1,1)
Алгебра блок-схем подчиняется обычным правилам алгебры. Умножение и сложение коммутативны, поэтому скобки в формуле. 1.1 не нужны.Это также означает, что положения блоков G c и G p на рис. 1.2 можно менять местами без изменения внешнего поведения системы.
Сигнал ошибки e является выходом суммирующего соединения, вычитающего измерение датчика из опорного входа r . Измерение датчика — это выходной сигнал системы y , умноженный на передаточную функцию датчика H . Это соотношение появляется в формуле.1.2.
(1,2)
Подставляя уравнение. 1.2 в уравнение. 1.1 и перестановка алгебраически приводит к формуле. 1.3.
(1,3)
Уравнение 1.3 — это передаточная функция, дающая отношение выходного сигнала системы к ее опорному входу. Эта форма модели системы подходит для использования в многочисленных задачах анализа и проектирования систем управления.
Используя соотношение уравнения. 1.3, вся система на рис. 1.2 может быть заменена эквивалентной системой, показанной на рис.1.3. Помните, что эти манипуляции допустимы только тогда, когда все компоненты блок-схемы являются линейными.
Рис. 1.3 Система, эквивалентная системе, показанной на Рис. 1.2.
Одним из первых шагов в процессе разработки системы управления является определение подходящего набора технических характеристик системы. Технические характеристики определяют процесс проектирования и позволяют определить, является ли конструкция контроллера удовлетворительной. Технические характеристики контроллера могут быть указаны как во временной области, так и в частотной области.
Спецификации во временной области обычно относятся к производительности в ответ на скачкообразное изменение входного опорного сигнала. Примером такого пошагового входа является мгновенное изменение входного задания с 0 на 1. Спецификации временной области включают, помимо прочего, следующие параметры [1]:
- Время нарастания с 10% до 90% от заданного значения, t r .
- Время достижения максимальной магнитуды, т р .
- Пиковая звездная величина, M p .Это часто выражается как процент пика, на который выходной сигнал превышает команду пошагового входа.
- Время установления с точностью до некоторой доли (например, 1%) значения команды пошагового ввода, t с .
Примеры этих параметров представлены на рис. 1.4. На этом рисунке показан отклик гипотетического объекта плюс контроллер на команду ступенчатого ввода с амплитудой, равной единице. Нулевое положение оси времени — это момент применения пошагового входа.
Рисунок 1.4 Рабочие параметры системы управления временной областью.
Переходная характеристика на рис. 1.4 представляет систему с изрядным количеством выбросов (в терминах M p ) и колебаниями перед схождением к опорному входу. Иногда ступенчатая характеристика вообще не имеет перерегулирования. Когда не происходит перерегулирования, параметр t p становится бессмысленным и M p равен нулю.
Ошибка отслеживания — это ошибка на выходе, которая остается после того, как функция ввода была применена в течение длительного времени и все переходные процессы прекратились.Обычно характеристики ошибки отслеживания установившегося контроллера задаются в ответ на различные управляемые входные функции, такие как шаги, линейные изменения и параболы.
Вот несколько примеров спецификаций ошибки отслеживания в ответ на различные входные функции:
- Ошибка отслеживания нуля в ответ на пошаговый ввод.
- Величина ошибки отслеживания менее X в ответ на ввод линейного изменения, где X — некоторое ненулевое значение.
В дополнение к спецификациям временной области, обсужденным выше, технические характеристики могут быть указаны в частотной области.Опорный вход контроллера обычно представляет собой низкочастотный сигнал, в то время как шум в измерениях датчика, используемых контроллером, часто содержит высокочастотные компоненты. Обычно желательно, чтобы система управления подавляла высокочастотные составляющие, связанные с шумом датчика, одновременно реагируя на изменения входного опорного сигнала. Технические характеристики, учитывающие эти требования к низкой и высокой частоте, будут выглядеть примерно так:
- Для синусоидальных опорных входных сигналов с частотами ниже точки отсечки амплитуда отклика замкнутого контура (установка плюс контроллер) должна быть в пределах X % от заданной амплитуды.
- Для синусоидальных опорных входных сигналов с частотами выше верхней точки отсечки амплитуда отклика замкнутого контура должна быть уменьшена как минимум на Y %.
Другими словами, приведенные выше требования к характеристикам в частотной области говорят, что реакция системы на ожидаемые изменения в опорном входе должна быть приемлемой с одновременным ослаблением влияния шума при измерении датчика. С этой точки зрения замкнутая система демонстрирует характеристики фильтра нижних частот.
Технические характеристикив частотной области будут рассмотрены более подробно в главе 4.
Стабильность — критический вопрос на протяжении всего процесса проектирования системы управления. Стабильный контроллер обеспечивает соответствующую реакцию на изменения входного опорного сигнала. Если система перестает правильно реагировать на изменения входного эталонного сигнала и вместо этого делает что-то еще, она становится нестабильной.
На рис. 1.5 показан пример нестабильного поведения системы. Первоначальная реакция на пошаговый ввод значительно превышает заданное значение.Реакцией на это превышение будет еще большее превышение в другом направлении. Эта картина продолжается, с увеличением амплитуды выходного сигнала с течением времени. В реальной системе такие нестабильные колебания нарастают по амплитуде до тех пор, пока некоторая нелинейность, такая как насыщение исполнительного механизма (или поломка системы!), Не ограничивает отклик.
Рис. 1.5 Система с нестабильным колебательным откликом.
Нестабильность системы представляет собой риск при использовании управления с обратной связью. Предотвращение нестабильности — важная часть процесса проектирования системы управления.
В дополнение к достижению минимальной степени устойчивости система управления должна обладать степенью устойчивости. Надежный контроллер может выдерживать ограниченные изменения параметров предприятия и его рабочей среды, продолжая обеспечивать удовлетворительную стабильную работу. Например, автомобильный круиз-контроль должен поддерживать желаемую скорость автомобиля, регулируя положение дроссельной заслонки в ответ на изменение уклона дороги (изменение окружающей среды). Круиз-контроль также должен работать должным образом независимо от того, тянет ли автомобиль с прицепом (изменение в параметрах системы.)
Определение допустимых диапазонов изменений параметров системы и окружающей среды является частью спецификации контроллера и процесса проектирования. Чтобы продемонстрировать надежность, разработчик должен оценить стабильность контроллера при наихудших комбинациях ожидаемых изменений параметров установки и окружающей среды. Для каждой комбинации значений параметров надежный контроллер должен удовлетворять всем своим требованиям к производительности.
При работе с линейными моделями объектов и контроллеров можно точно определить, образуют ли конкретный объект и контроллер стабильную систему.В главе 3 описывается, как определить устойчивость линейной системы.
Если математической модели для установки не существует, стабильность можно оценить только путем тестирования установки и контроллера в различных рабочих условиях. В главе 2 рассматриваются методы разработки устойчивых систем управления без использования модели объекта. В главе 9 описаны методы проведения тщательного тестирования системы управления.
Тестирование является неотъемлемой частью процесса проектирования системы управления. Многие методы проектирования в этой книге основаны на использовании линейной модели объекта.Создание линейной модели всегда включает приближение и упрощение истинного поведения растения. Реализация контроллера с использованием встроенного процессора привносит нелинейные эффекты, такие как квантование. В результате как объект, так и контроллер содержат нелинейные эффекты, которые не учитываются при проектировании линейной системы управления.
Идеальный способ продемонстрировать правильную работу нелинейного объекта и контроллера во всем диапазоне поведения системы — это провести тщательное тестирование на реальном объекте.Этот тип тестирования на уровне системы обычно проводится на поздних этапах процесса разработки продукта, когда становится доступным прототип оборудования. Проблемы, обнаруженные на этом этапе цикла разработки, как правило, очень дорого исправить.
По этой причине очень желательно проводить тщательное тестирование на гораздо более ранней стадии цикла разработки. Раннее тестирование позволяет обнаруживать и устранять проблемы, когда их исправить относительно легко и недорого. Однако тестирование контроллера на ранних этапах процесса разработки продукта может оказаться непростым, если не существует прототипа завода, на котором можно было бы проводить тесты.
Системное моделирование позволяет решить эту проблему [2]. Симуляция, содержащая подробные модели установки и контроллера, чрезвычайно важна для выполнения тестирования системы управления на ранней стадии. Это моделирование должно включать все соответствующие нелинейные эффекты, присутствующие в реальных реализациях объекта и контроллера. Хотя имитационная модель объекта обязательно должна быть упрощенной аппроксимацией реальной системы, она должна быть гораздо более достоверным представлением, чем линейная модель объекта, используемая в конструкции контроллера.
При использовании моделирования в процессе разработки продукта обязательно выполнить тщательную верификацию и валидацию моделирования.
- Проверка показывает, что моделирование было выполнено правильно в соответствии с проектными спецификациями.
- Валидация демонстрирует, что моделирование точно представляет поведение моделируемой системы и ее среды для предполагаемых целей моделирования.
Этап проверки актуален для любого процесса разработки программного обеспечения и просто показывает, что программное обеспечение работает так, как задумано его разработчиками.При моделировании проверка может происходить на ранних стадиях проекта разработки продукта. Возможно (и обычно) выполнять верификацию для моделирования системы, которая еще не существует. Это состоит в том, чтобы убедиться, что модели, используемые в симуляции, правильно реализованы и дают ожидаемые результаты. Верификация позволяет создавать и применять моделирование на самых ранних этапах проекта разработки продукта.
Validation — это демонстрация того, что имитация моделирует встроенную систему и реальную рабочую среду с приемлемой точностью.Стандартный подход к валидации заключается в использовании результатов эксплуатационных испытаний системы для сравнения с результатами моделирования. Это включает запуск моделирования по сценарию, который идентичен тесту, который был выполнен реальной системой в реальной среде. Результаты двух тестов сравниваются, и различия анализируются, чтобы определить, представляют ли они существенные отклонения между моделированием и реальной системой.
Недостатком этого подхода к валидации является то, что это не может произойти, пока не будет доступен полный прототип системы.Даже когда прототип не существует, можно выполнить проверку на более ранней стадии проекта на уровне компонентов и подсистем. Вы можете выполнять тесты этих элементов системы в лабораторных условиях и дублировать тесты с помощью моделирования. Сравнение результатов двух тестов дает уверенность в достоверности модели компонента или подсистемы.
Системное моделирование широко используется в мире техники управления. Если вы не знакомы с инструментами и методами моделирования, см. Ссылку [2] для введения в эту тему.
Классические методы анализа и проектирования систем управления, обсуждаемые в главе 4, изначально были разработаны и изучались в течение многих лет как методы, основанные на рисованных эскизах. Хотя такой подход приводит к определенному уровню дизайнерской интуиции у учащихся, для развития необходимых навыков требуется много времени и практики.
Поскольку эта книга предназначена для того, чтобы дать читателю возможность быстро применить различные методы проектирования систем управления, упор будет делаться на автоматизированные подходы, а не на ручные методы.На рынке имеется несколько пакетов программного обеспечения, которые выполняют функции анализа и проектирования систем управления, а также полное моделирование нелинейных систем. Некоторые примеры приведены ниже.
- VisSim / Анализ. Этот продукт выполняет линеаризацию нелинейных моделей объекта и поддерживает проектирование и тестирование компенсаторов. Это надстройка к продукту VisSim, который представляет собой инструмент для моделирования сложных динамических систем. Для получения дополнительной информации см. Https: // vissim.ru / products / addons / analysis.html.
- Система управления Mathematica Professional. Этот инструмент выполняет линейный анализ и проектирование систем SISO и MIMO во временной и частотной областях. Это дополнение к продукту Mathematica. Mathematica предоставляет среду для выполнения символьных и числовых математических вычислений и программирования. Для получения дополнительной информации см. Https://wolfram.com/products/applications/control/.
- MATLAB Control System Toolbox. Это набор алгоритмов, реализующих общие методы анализа, проектирования и моделирования систем управления.Он охватывает классические методы проектирования, а также современные методы в пространстве состояний. Это надстройка к продукту MATLAB, который объединяет математические вычисления, визуализацию и язык программирования, что позволяет разрабатывать и применять сложные алгоритмы к большим наборам данных. Для получения дополнительной информации см. Https://mathworks.com/products/control/.
В этой книге используется MATLAB, Control System Toolbox и другие дополнительные продукты MATLAB для демонстрации разнообразных методов моделирования, проектирования и симуляции систем управления.Эти инструменты предоставляют эффективные, надежные в числовом отношении алгоритмы для решения различных инженерных задач систем управления. Среда MATLAB также предоставляет мощные графические возможности для отображения результатов анализа системы управления и процедур моделирования.
Программное обеспечение MATLAB недешево, но такие мощные инструменты редко бывают такими. Информация о ценах доступна на сайте https://mathworks.com/store/index.html. Продукты MATLAB доступны в течение бесплатного 30-дневного пробного периода.Если вы студент, использующий программное обеспечение вместе с курсами в учреждении, присуждающем ученую степень, вы имеете право приобрести MATLAB Student Version и Control System Toolbox по значительно сниженной цене. Для получения дополнительной информации см. Https://mathworks.com/products/studentversion/buy_now.shtml.
Системы управления с обратной связью измеряют атрибуты управляемой системы и используют эту информацию для определения управляющего сигнала исполнительного механизма. Управление с обратной связью обеспечивает более высокую производительность по сравнению с управлением без обратной связи при изменении параметров окружающей среды или системы.
Управляемая система называется заводом. Некоторые характеристики предприятия, связанные с процессом проектирования системы управления:
- Линейность. Для некоторых методов проектирования, представленных в следующих главах, требуется линейное представление объекта. Все системы реального мира нелинейны, но часто можно разработать подходящую линейную аппроксимацию объекта.
- Непрерывное или дискретное время. Система непрерывного времени обычно является лучшим способом изобразить растение.Встроенные вычислительные системы работают в режиме дискретного времени. Устройства ввода-вывода, такие как ЦАП и АЦП, являются интерфейсами между объектом непрерывного времени и контроллером дискретного времени.
- Количество входных и выходных сигналов. Завод с одним входом и одним выходом — это система SISO. Если он имеет более одного входа или выхода, это система MIMO. Системы MIMO часто могут быть аппроксимированы как набор систем SISO для целей проектирования.
- Наличие задержек. Задержки на установке добавляют сложности к проблеме разработки контроллера.
Два основных шага в проектировании системы управления:
- Укажите структуру контроллера.
- Определите значение проектных параметров в этой конструкции.
Процесс проектирования системы управления обычно включает итеративное применение этих двух шагов. На первом этапе выбирается структура кандидата-контроллера. На втором этапе метод проектирования используется для определения подходящих значений параметров для этой структуры. Если результирующая производительность системы неадекватна, цикл повторяется с новой, обычно более сложной структурой контроллера.
Блок-схема установки и контроллера графически представляет структуру конструкции контроллера и ее взаимодействие с установкой. Можно выполнять алгебраические операции над компонентами блок-схемы, чтобы привести диаграмму к более простой форме.
Технические характеристикиопределяют процесс проектирования и позволяют определить, когда производительность контроллера является удовлетворительной. Технические характеристики контроллера могут быть указаны как во временной, так и в частотной области.
Стабильность — критический вопрос на протяжении всего процесса проектирования системы управления. Стабильный контроллер обеспечивает соответствующую реакцию системы на изменения входного опорного сигнала. Оценка устойчивости должна выполняться как часть анализа конструкции контроллера.
Тестирование является неотъемлемой частью процесса проектирования системы управления. Крайне желательно провести тщательное тестирование системы управления на ранней стадии цикла разработки, но прототипы системного оборудования могут быть недоступны в это время.В качестве альтернативы имитация, содержащая подробные модели установки и контроллера, полезна для выполнения тестирования системы управления на ранней стадии. Когда доступен прототип оборудования, необходимо провести тщательное тестирование системы управления в предполагаемом диапазоне рабочих условий.
На рынке имеется несколько пакетов программного обеспечения, которые выполняют функции анализа и проектирования систем управления, а также полное моделирование нелинейных систем. Эти инструменты могут значительно ускорить этапы проектирования и анализа системы управления.В этой книге особое внимание будет уделено применению MATLAB Control System Toolbox и других продуктов, связанных с MATLAB, для проектирования систем управления, анализа и задач системного моделирования.
Взято из встроенных систем управления на C / C ++
(PDF) Структурные системы управления, внедренные в гражданском строительстве
6. Заключение
Очевидно, что активные, гибридные и полуактивные методы управления состоят из
важных компонентов, таких как датчики, контроллеры, исполнительные механизмы и генераторы
.Эти устройства должны быть частью структурной системы с
реалистичной оценкой их характеристик и проверкой их способности к длительной эксплуатации
.
Общая цель данной статьи — представить основные концепции пассивной,
активной, гибридной и полуактивной систем управления. Эти системы должны быть проанализированы
на предмет стабильности, эффективности, стоимости и требуемого энергопотребления. Принятие инновационных систем
представляет собой потенциальное исследование будущего, а практическое применение
вызывает большую озабоченность во всем мире.
СПРАВОЧНАЯ ИНФОРМАЦИЯ
1. Будеску М., Чондради И.П., Царану Н., Гаврилаш И., Чупала Михаэла Анка, Лунгу Ирина,
Восстановление конструкций, Editura Vesper, Iaşi, 2001.
2. Ciupală Anca Оптимальные процедуры повышения безопасности конструкций, подверженных сейсмическим воздействиям
с учетом торсионного воздействия, кандидатская диссертация, Технический университет »Gh. Асачи »№
Яссы, 1998.
3. Гроват, Д., Барак П., Рабинс М., Полуактивные и пассивные или активные настроенные демпферы массы для структурного контроля
, ASCE Journal Eng. Mech., 1983, с. 691–705.
4. Хауснер Г.В., Бергам Л.А., Коши Т.К., Часиакос А.Г., Клаус Р.О., Скелтон С.М. and R.E.,
Soong T.T., Spencer B.F., Yao J.P.T., Structural control: Past, Present and Future Control,
Journal of Engineering Mechanics, pp. 897-971, (1997).
5. Карнопп Д.К., Кросби М.Дж., Харвуд Р.А., Контроль вибрации с использованием полуактивных генераторов силы
. ASME Journal of Engineering for Industry 2, 619-626 (1974).
6. Кабори Т. Миссия и перспективы будущих исследований в области структурного контроля. Труды
Второй Всемирной конференции по структурному контролю, Vol. I, Киото, Япония, 1999, ISBN 0471 98310
11999.
7. Джером П.Л., Исследования активного структурного контроля в корпорации Кадзима. Программа Летнего института в Японии Национального научного фонда
, 1998 г.
8. Магонетт Г., Марацци Ф., Тоньоли П., Букет П., Ренда В., Экспериментальный анализ активного
Контроль вибрации крупномасштабного макета вантового моста. Труды 7-го Международного семинара
по сейсмической изоляции, пассивному рассеянию энергии и активному контролю колебаний конструкций
, Ассизи, Италия, 2001.
9. Марацци Ф., Магонетт Г. Активный и полуактивный контроль Структуры: сравнение. Европейское совещание
по интеллектуальным структурам, Искья, Италия, 2001 г.
10. Марацци Ф. Полуактивный контроль строительных конструкций: аспекты реализации. Докторская диссертация,
Университет Павии, факультет структурной механики, 2002.
11. Пастиа С., Пассивные и полуактивные системы управления: теоретические, численные и экспериментальные
Аспекты, техн. Отчет, Специальная публикация JRC I.04.94, Европейская комиссия, Институты защиты и безопасности граждан
, Via Enrico Fermi, 21020 Ispra (VA), Италия, 2004.
12. Пэулеш-Крэиничану Ф., Контроль сейсмического отклика длинных вантовых мостов. Труды
Второй Всемирной конференции по структурному контролю, Киото, Япония, Vol. 2, pp. 959-964, John
Willey & Sons, Chichester, 1999, ISBN 0471 98310 11999.
13. Preumont A., Контроль вибрации активных структур: Введение, 2-е издание, Kluwer
Academic Publishers, 2002
14. Сунг, Т.Т. и Б.Ф. Спенсер, Дополнительное рассеяние энергии: современное и современное состояние
Практика.Инженерные сооружения, Vol. 24, pp. 243–259, 2002.
33. Структуры систем управления — как это работает? Автоматика, компьютеры и т.д …
Предварительный курс автоматики
Глава 33. Структуры систем управления
Глава 33.1 Введение
Структуры управления не зависят от типов контроллеров. Это может быть PID , ON-OFF или любой другой тип PID без продолжения.
Небольшое отступление насчет «типов non-continue PID ».Вы читаете руководство к контроллеру ON-OFF , и там есть кое-что о параметрах Kp , Ti и Td . Что это? Эти параметры, возможно, предназначены только для контроллеров Continos. Действительно? Но представьте, что выходной сигнал контроллера s (t) представляет собой прямоугольную волну с коэффициентом заполнения, пропорциональным требуемому значению. Шаговый контроллер — самый известный непостоянный контроллер. Он имеет только 3 выходных значений. Это + max , 0 и -max и в основном используются для позиционирования клапанов.Это позиционирование реализуется характеристикой шагов -> имя шаговый контроллер .
Но вернемся к нашей основной теме — Структуры систем управления .
Проверим структуры систем:
1 — Открытый контур
2 — Открытый контур с компенсацией шума
3 — Замкнутый контур
4 — Замкнутый контур с компенсацией шума
5 — Каскадное управление
6 — Контроль соотношения
Глава 33.2 Открытый контур
Рис. 33-1
Вышеупомянутый теплообменник является примером системы с открытым контуром. Удобно, когда регулирующий блок — здесь усилитель мощности с нагревателем, входит в состав объекта Go (s) . Система разомкнутого контура имеет ряд преимуществ. Это просто и почти всегда стабильно. Но он не устойчив к возмущениям — z (t) = + 0,4 доп. Нагреватель здесь.
Каждый серьезный контроллер оборудован переключателем A / M — автоматический / ручной.
Переключатель A / M — это A — автоматическое положение -> преобразует Рис. 33-1 (разомкнутый контур) в Рис. 32-11 -> предыдущая глава (замкнутый контур)
Переключатель A / M — это M , ручное положение -> преобразует Рис. 32-11 (разомкнутый контур) -> предыдущая глава с на Рис. 33-1 (разомкнутый контур). Это ручное управление и используется в аварийных или других нетипичных ситуациях.Это может быть обычный переключатель, но в основном это программный переключатель на мониторе компьютера.
Основное требование к переключателю A / M — обеспечить плавный переход из режима A в режим M и наоборот. Что это за «нежное»? Нет управляющих сигналов с (t) непостоянных шагов.
Call Desktop / PID / 19_struktury_ukladow_regulacji / 01_otw
Рис. 33-2
Модель с открытым контуром X-cos .
Нажмите «Пуск»
Рис.33-3
Уставка x (t) и возмущение z (t) реакция. Этот эксперимент доказывает, что система с разомкнутым контуром не устойчива к возмущениям z (t) .
Глава 33.3 Разомкнутый контур с компенсацией шума или с упреждением управление — другое имя.
Глава 33.3.1 Введение
Имя с прямой связью соответствует обратной связи напротив. Это возможно, если мы сможем измерить возмущение z (t) .
Глава 33.3.2 Разомкнутый контур с неполной компенсацией шума k = 0,7
Рис. 33-4
На схеме Рис. 33-1 + дополнительный компонент-компенсатор. Он измеряет возмущение z (t) = + 0,4 и вычисляет управляющий сигнал s (t) = x (t) -k * z (t) , подаваемый на вход объекта Go (s) . Управляющий сигнал s (t) дополнительный компонент -k * z (t) имеет направление, противоположное направлению возмущения z (t) .Он действует как компенсатор.
Этот контроллер немного любопытен. Он не использует выходной сигнал Go (s) y (t) , но: входной сигнал
— x (t) . Это не любопытно
— z (t) входной сигнал нарушения
Call Desktop / PID / 19_struktury_ukladow_regulacji / 02_otw_niepelna_komp.zcos
Рис. 33-5
Нажмите «Пуск»
Рис. 33-6
Сравните с Рис. 33-3 Классическая система с открытым контуром .Возмущение z (t) было явно, но лишь частично подавлено. Как выполнить полную компенсацию помех z (t) ? Очевидно. Сделаем полный k = 1 компенсатор
Глава 33.3.3 Разомкнутый контур с полной компенсацией шума k = 1
Рис. 33-7
k = 1 компенсация
Call Desktop / PID / 19_struktury_ukladow_regulacji / 03_otw_pelna_komp.zcos
Рис. -8
Нажмите «Пуск»
Рис.33-9
Управляющий сигнал s (t) находится в анафазе до z (t) = + 0,4 , и возмущение было полностью компенсировано. Выход y (t) работает как копье, независимо от возмущения z (t) !
Теперь возникают два вопроса :
1 — Какова причина эксперимента Рис. 33-4 с k = 0,7 ? Очевидно, что лучше всего k = 1 .
2 — k = 1 компенсация возмущений в порядке.Мы даже не видим возмущающего эффекта z (t) ! Почему этот метод не универсален?
Ответить на вопрос s
У нас хорошее положение. Мы знаем объект Go (s) , и расчет k = 1 ясен как день. Но представьте, что вы находитесь на нефтеперерабатывающем заводе. Вы не видите никакой передаточной функции Go (s) , но столбцы, конвейеры и т.д. Даже у вас есть потенциометр регулятора с диапазоном k = 0… 1.5 идеальное значение k возможно экспериментально или по точно математической модели объекта Go (s) . Эти методы не так очевидны, как в Fig. 33-4 !
Глава 33.3.4 Разомкнутый контур с компенсацией шума в «середине» объекта Go (s)
Рис. 33-10
«Нагреватель возмущений» расположен рядом с резервуаром №2. 2 змеевик. Надеюсь, вы понимаете слово «середина» в названии главы. Ожидаем подавления возмущений.Но будет ли так хорошо, как Рис. 33-9 с помехой на входе Go (s) ?
Call Desktop / PID / 19_struktury_ukladow_regulacji / 04_otw_pelna_komp_srodek.zcos
Рис.33-11
Xcos модель Рис.33-10 .
Нажать «старт»
Рис. 33-12
Реакция компенсатора верная. Возмущение было компенсировано через 65 сек . Но Рис. 33-9 был намного лучше, потому что здесь не было временного состояния.Как мы можем улучшить реакцию на помехи? Если передаточная функция Gzk (s) между z (t) и сигналом компенсации sk (t) была Gzk (s) = 1 -> компенсация будет идеальной, как в Рис. 33- 9 !
Глава 33.3.5 «Обратная» передаточная функция
Как преобразовать каждые G (s) в G (s) = 1 ?
Рис. 33-13
Надеюсь, идея проста. Давайте попробуем преобразовать инерциальную единицу для пропорциональной единицы G (s) = 1 .
Call Desktop / PID / 19_struktury_ukladow_regulacji / 05_odwrotn_G (s) .zcos
Рис. 33-14
G (s) = (1 + 3 * s) / (1 + 3 * s) = 1 Но Xcos не реализует чистый блок 1 + 3 * s . Он реализует почти такой же блок, но с меньшей инерцией 1 / (1 + 0,01 * с) , как на рисунке выше. G (s) будет почти G (s) = 1 , почти пропорционально единицам !
Нажмите «Пуск»
Рис. 33-15
Рис.33-15a
— y1 (t) Отклик инерциального блока
— y2 (t) почти « пропорциональный» блок G (s) = 1 как инерциальный блок и его “ инверсия » изделие.
Посмотрите на y2 (t) в Fi g. 33-15а . Похоже, что y2 (t) = x (t) . «Неидеальным» является начало y2 (t) около 1 сек . Есть небольшое влияние инерции 1 / (1 + 0.01 * с) . Но мы преобразовали инерцию 1 / (1 + 3 * s) в пропорциональную единицу G (s) = 1 . Почти!
Рис. 33-15b
Показывает причину быстрого y2 (t) по сравнению с медленным y1 (t) . Причина — сильная дифференциация сигнала x (t) , хорошо различимая по другим параметрам осциллографа.
Заключение
Преобразование Go (s) в пропорциональное Go (s) = 1 требует сильной дифференциации и большой мгновенной мощности.См. blue xp (t) signal-особенно Рис. 33-15b .
Глава 33.3.6 Разомкнутый контур с «обратной» компенсацией шума в «середине» объекта Go (s).
Название главы немного сложное, но мы знаем, «в чем дело».
Рис. 33-16
Call Desktop / PID / 19_struktury_ukladow_regulacji / 06_otw_pelna_komp_zakl_srodek_odwr.zcos
Рис. 33-17
Это Рис. 33-16 Модель Xcos .Знаменатель компенсатора (1 + 0,01 * с) имеет одно отличие только здесь. Почему? См. Рис. 33-14 . Мы построили (почти) обратную передаточную функцию.
Нажмите «Пуск»
Рис. 33-18
Рис. 33-18a
Подавление возмущений было таким же, как на Рис. 33-10 , потому что передаточная функция Gzk (s) между z (t ) и сигнал компенсации sk (t) был почти пропорционален Gzk (s) = 1 ! Это означает, что температура змеевика sk (t) в баке нет. 2 может немедленно отреагировать на возмущение z (t) = + 0,4 ! Можно уменьшить влияние помех, что хорошо видно на Fig. 33-12 . Но реакция контроллера s (t) сигнал сейчас очень быстрая, особенно это компонент дифференциации D .
Рис. 33-18b
Вы видите весь управляющий сигнал s (t) по сравнению с x (t) = 1 ! Очень-очень большой. Он компенсирует инерцию 1 / (1 + 3 * s) .В остальном объект — танк №2. 2 динамика «думает», что + шаг возмущение z (t) = + 0,4 (почти) идеально компенсировано Tc1 температура Δ = -0,4 падение шага.
Анализ s (t) и sk (t) затруднен, поскольку эти сигналы частично перекрываются. На следующем рисунке они показаны отдельно
Рис. 33-19
s (t) , sk (t) и z (t) сигналы показаны отдельно.
Рис. 33-19 a
Существует очень сильная реакция контроллера s (t) на возмущение z (t) = + 0,4 в 40 sec ! Весь сигнал виден на Рис. 33-18 a . Напоминаю, что нашего ТЭНа в баке нет. 1 — элемент Пельтье. Положительное напряжение нагревается, а отрицательное охлаждение! Мгновенное мощное охлаждение с (т) = — 120 . Это соответствует -12000 ° C ! Мы знаем, что минимальная температура в мире составляет -273.15 ° С ! Но мы согласились, что в этом курсе существует температура -12000 ° C . Это охлаждение вызывает немедленное падение sk (t) в Fig. 33-19 b и (почти) идеальное z (t) = + 0,4 компенсация возмущений.
Глава 33.4 Замкнутый контур
Самая популярная структура в теории систем управления. Остальные — это только его модификации.
Рис. 33-20
Пример замкнутой системы. Практически весь этот курс — это системы с замкнутым циклом, и предмет на этом закончен.
Глава 33.5 Замкнутый контур с компенсацией шума — Другое название–> Замкнутая открытая система
Глава 33.5.1 Введение
Разомкнутый контур с компенсацией шума обеспечивает подавление шума при условии, что это шумовое воздействие возможно измерить. Но:
— возможны и другие помехи
— статическая и динамическая характеристика Go (s) не меняется.
Решение проблемы очевидно.Необходимо замкнуть контур с помощью контроллера PID . Все другие нарушения следует подавлять.
Будут проверены различные комбинации:
-Полная компенсация k = 1 и возмущение z (t) , расположенное на входе объекта -> p. 33.5.2
— Неполная компенсация k = 0,7 и возмущение z (t) , расположенное на входе объекта -> p. 33.5.3
-Полная компенсация k = 1 и z (t) возмущения, расположенного в «середине» объекта -> p.33.5.3
-Полная компенсация k = 1 и z (t) возмущения, расположенного на входе объекта и дополнительного возмущения, расположенного «посередине» объекта -> p. 33,5,5
Глава 33.5.2 Полная компенсация k = 1 и возмущение z (t) , расположенное на входе объекта
Рис. 33-21
Параметры Kp, Ti и Td позволяют оптимальная уставка x (t) отклик.
Call Desktop / PID / 19_struktury_ukladow_regulacji / 07_zamk_komp_1.zcos
Рис. 33-22
Wciśnij «start»
Рис. 33-23
Ответ y (t) идентичен ответу для чистого Closed петля -> Рис.32-13 глава 32 до 40 сек .
z (t) = + 0,4 возмущение в 40 сек вызывает немедленный компенсатор -0,4 реакция–> Возмущение полностью компенсировано! y (t) не изменится.Классический контроллер PID (например, PID без компесаторной части) не реагирует! Он даже не заметил z (t) ! Всю работу выполняла компенсаторная часть контроллера.
Глава 33.5.3 Неполная компенсация k = 0,7 и возмущение z (t) , расположенное в объекте
Полную компенсацию возмущения выполнить непросто. Нарушение может быть трудно измерить. Статические и динамические параметры Go (s) плохо определены… и т. Д.Этой ситуации соответствует k = 0,7 .
Рис. 33-24
Почти Рис. 33-21 копия. Разница составляет k = 0,7 , а не k = 1 . Сейчас мы ожидаем некоторого влияния z (t) .
Call Desktop / PID / 19_struktury_ukladow_regulacji / 08_zamk_komp_0.7.zcos
Рис. 33-25
Нажмите «старт»
Рис. 33-26
Компенсатор k = 0.7 делает только то, что возможно. Он компенсирует только часть помех z (t) .Остальные искажения z (t) подавляются классическим контроллером PID . Другими словами — замкнутым контуром.
Глава 33.5.4 Полная компенсация k = 1 и возмущение z (t) , расположенное в «середине» объекта
Рис. 33-27
Call Desktop / PID / 19_struktury_ukladow_regulacji / 09_zamk_pelna_krokomp_zak .zcos
Рис. 33-28
Нажмите «Пуск»
Рис.33-29
Помехи z (t) = + 0,4 компенсируются компенсирующей частью контроллера PID . Деталь PID никак не отреагировала, даже не заметила помехи. Другими словами, часть контроллера PID была незакреплена.
Глава 33.5.5 Полная компенсация k = 1, возмущение z1 (t) , расположенное на входе объекта, и дополнительное возмущение z2 (t) в «середине» объекта
z1 (t) = + 0.4 нарушение — это отопление возле резервуара №4. 1 бухта трубы 40 сек . Это будет полностью компенсировано.
Дополнительное возмущение z2 (t) = — 0,6 представляет собой отрицательное напряжение охлаждения на элементе Пельтье рядом с резервуаром №. 2 бухта трубы в 55 сек .
Рис. 33-30
Технологическая схема с 2 возмущениями.
Call Desktop PID / 19_struktury_ukladow_regulacji / 10_zamk_komp_2_zaklocenia.zcos
Рис. 33-31
Нажмите «start»
Рис. 33-32
z1 (t) = + 0,4 нагрев за 40 секунд был компенсирован только частью компенсатора контроллера- немедленное с (t) падение сигнала -0,4 .
z2 (t) = — 0,6 охлаждение было компенсировано контроллером PID часть — s (t) сигнал +0,6 увеличение. Другими словами — это была нормальная обратная связь по замкнутому контуру.
Глава 33.5.6 Выводы
1. Замкнутый контур с системой компенсации шума позволяет идеально подавить помехи при условии, что:
— точное измерение помех
— соответствующая передаточная функция компенсатора -> главы 33.5.2 и 33.5.3 2. Сильно улучшается качество контроля, даже если условия а / м не выполняются идеально.
3. В номинаторе передаточной функции компенсатора -> дифференциация — с .Это вызывает очевидные проблемы.
4. Остальные нескомпенсированных помех подавляются PID с нормальной обратной связью.
Глава 33.6 Каскадное управление
Глава 33.6.1 Введение
Качество управления лучше, чем у классического замкнутого контура , и немного хуже, чем у замкнутого контура с компенсацией шума . Но, в отличие от последнего, не требует измерения помех и хорошего знания объекта Go (s) .
Принцип действия аналогичен корпорации. Президент корпорации управляет всей корпорацией, а менеджер — только отделом.
Президент поручает задачу менеджеру, и ему все равно. Строго-президента не волнуют беспорядки в ведомстве. Рабочий г-н Браун пьян или отсутствуют некоторые счета-фактуры с НДС. Это работа начальника отдела, потому что он ближе к беспорядкам, чем президент. Менеджер идеален, когда президент не заботится о мелочах. Президент — это превосходный контроллер PID , а менеджер — простой контроллер, в основном типа P .
Глава 33.6.2 Каскадное управление с одним возмущением z (t)
Рис. 33-33
Контроллер P сравнивает номер резервуара. 1 температура жидкости Tc1 с управляющим сигналом sPID (t) . Существует внутренний цикл, и Tc1 пытается следовать за сигналом sPID (t) . Контроллер PID является президентом всей корпорации — всего объекта с 2 резервуарами и P является диспетчером резервуара No.Только 1 . PID — это контроллер высшего уровня, а P — простой контроллер.
Есть 2 преимущества каскадного управления.
1. Внутренний контур снижает инерцию бака № 1 . Все объекты легче контролировать.
2. z1 (t) = + 0.4 предполагается быстрее, чем с классической системой с обратной связью -> Рис. 32-11 глава 32 . Простой контроллер P подавляет помехи так быстро, что превосходный PID почти не замечает влияние z (t) для сигнала y (t) !
Давай проверим.
Call Desktop / PID / 19_struktury_ukladow_regulacji / 11_kaskadowy_10_7_2.zcos
Рис. 33-34
Нажмите «старт»
Рис. 33-35
Сравните red y (t) с классическим замкнутым контуром–> Рис.32-13 Глава 32 . Небольшое влияние z (t) существует, но здесь его не видно! А вот на уставку x (t) отклик намного хуже! Почему? Ответ прост. Вся инерция объекта теперь меньше, потому что внутренний контур «опустил» тнак №. 1 инерция. Значит, теперь есть другие оптимальные параметры PID !
Глава 33.6.3 Каскадное регулирование с одним возмущением z (t) и с более оптимальными параметрами ПИД-регулятора
Новые параметры ПИД-регулятора Kp = 10 Ti = 5 сек i Td = 0,55 сек были установлены пробным и -error метод. Будет лучше?
Call Desktop / PID / 19_struktury_ukladow_regulacji / 12_kaskadowy_10_5_0.55.zcos
Рис. 33-36
Новый Kp, Ti, Td Параметры
Нажмите «Старт»
Рис.33-37
Ударная. Но мегашок если сравнивать с рис. 32-13 глава 32 !
Но, пожалуйста, один комментарий. Посмотрите на Рис. 33-32. Установившееся состояние s (t) = y (t) здесь–> y (t) e.i. Выход Go (s) равен управляющему сигналу s (t) . Мы привыкли, что «это всегда». Посмотрите на Рис. 33-37 -> sPID (t) ≠ y (t) ! Почему?
Общее правило установившегося состояния: :
с (t) = k * y (t)
с (t) — это управляющий сигнал, а k — это Go (s) статическое усиление объекта.
Прирост объекта пока составил k = 1 . А какова ситуация с каскадным управлением? Теперь усиление внутреннего контура составляет 0,909 ! Это означает, что sPID (t) = 1.1 * y (t) , когда z (t) = 0 e.i. перед 40 сек . Эксперимент это подтверждает.
Глава 33.6.4 Каскадное регулирование с двумя возмущениями
Рис. 33-38
Помехи z1 (t) = + 0,4 — это дополнительный нагрев во внутреннем контуре. Он будет сильно подавлен главным образом скромным контроллером P .
Возмущение z2 (t) = — 0,6 — дополнительное охлаждение (минус на элементе Пельтье!) Бака №2. 2 змеевик. Он тоже должен подавляться, но не так быстро, как возмущение z1 (t) . Это работа для вышестоящего контроллера PID . Он также несет ответственность за все другие неудобства.
Call Desktop / PID / 19_struktury_ukladow_regulacji / 14_kaskadowy_10_5_0.55_2_zaklocenia.zcos
Рис. 33-39
Нажмите «Пуск»
Рис.33-40
Поведение системы идентично Рис. 33-37 до 55 сек , т.е. до z2 (t) внешнего вида. Реакция контроллера PID сразу после 55 сек . z2 (t) тоже было подавлено, но было замечено влияние z2 (t) .
Имеет ли низкий положительный эффект контроллера P для подавления z2 (t) ? Да! Контроллер P снизил инерцию внутреннего контура–> теперь инерция всего объекта ниже.Теперь мы можем установить более агрессивные параметры PID .
Глава 33.7 Управление соотношением
Глава 33.7.1 Введение
Обычная система управления пытается следовать входному сигналу x (t) , что установившееся состояние составляет y (t) = x (t) . Система управления соотношением выполняет аналогичную работу, но в установившемся состоянии y (t) = k * x (t) . Параметр k представляет собой коэффициент отношения .
Это может быть, например, план смешивания красок t–> глава 33.7.2
Другой — газовый паровой котел -> р. 33.7.2 Есть одна полнота сгорания. Должен выполняться один оптимальный коэффициент параметра k = газ / воздух . Когда газа слишком много–> не весь газ будет сжигаться, Когда слишком много воздуха–> происходит ненужное охлаждение котла.
Глава 33.7.2 Схема смешивания красок t
Соответствующим цветом является соответствующая основная смесь цветов 3 .
Кстати. Немецкий поэт Йохан Вольфганг Гете — автор круга цветов . И «Печали юного Вертера» были для него менее ценными, чем теория цвета .
Соответствующий цвет: 2 смесь цветов K = зеленый / красный = 1/3 . Резервуар будет заполнен трубами красных и зеленых с расходами Fz , Fcz и K = Fz / Fcz = 1/3 .
Фиг.33-41
Лакокрасочный завод
Как работает лакокрасочный завод?
Уставка x (t) подходит для диапазона расхода 0… + 10V , а измеренная Fcz (t) подходит для этого же диапазона 0… + 10V , конечно. Контроллер P сравнивает уставку x (t) с расходом Fcz (t) от расходомера PP и вычисляет управляющий сигнал для клапана. Вал клапана и электропривод SE образуют , объединяющий блок с передаточной функцией 1/5 * s .Как убедить вас в интеграции модуля? Представьте, что контроллер P выдает маленькое напряжение + . Вал медленно перемещается вправо, и клапан медленно открывается. в два раза больше + напряжение удвоит открытие клапана , скорость . Напряжение 0 означает, что x (t) = Fcz (t) и клапан находится в состоянии покоя. — напряжение вызовет закрытие клапана. Вы верите мне, что клапан + электропривод интегрирующий блок ? Интегрирующий блок 1/10 * с в два раза медленнее, чем блок 1/5 * с .Клапан с расходомером образует инерционный блок 1 / (1 + 1 * s) .
«Правый» зеленый деталь системы управления лакокрасочным покрытием действие аналогично.
Устойчивое состояние: Fz = Fcz /3
Давайте проверим.
Call Desktop / PID / 19_struktury_ukladow_regulacji / 15_reg_stos_mieszalnia.zcos
Рис. 33-42
Существуют системы управления типа I .
Нажмите «Старт».
Рис. 33-43
Контроль соотношения Цель достигнута.Есть стационарные потоки и K = Fz / Fcz = 1/3 .
Глава 33.7.3 G as паровой котел
Это менее тривиальный пример регулирования соотношения , чем установка для смешивания красок
Рис. 33-44
Газовый паровой котел
Это котел барабан наполнен водой и снабжен природным газом. Котел питает многие устройства, не показанные на рисунке. Наша цель — обеспечить стабильное давление пара cp (t) независимо от помех в виде двухпозиционных различных пароприемников.
Газовые котлы и теплотехника вообще не мое дело. Сообщается, что оптимальным является расход газа / расход воздуха = k = 10 . Но по дидактическим соображениям оптимальным является k = 1,5 .
Gkoc (s) — Паровой котел
Вход — расход газа Fg (t) и k = 1,5 больший расход воздуха Fp (t) *
Мощность — пара давление Cp (t) — , более строго напряжение 0… + 10V , соответствующее tp 0… 10 МПа давлению.
Здесь очень упрощена физика и система управления. Мы предполагаем, что имеется система контроля уровня (здесь не показана) и уровень воды в котле постоянный независимо от изменений расхода пара. Увеличение потока природного газа на Fg (t) вызывает повышение температуры и повышение давления пара на Cp (t) . Это инерционный блок с T = 120 с с контуром регулирования PI .
* Расход воздуха Fp (t) существует только по большему числу около котла.На нижней блок-схеме нет входа. Это правильно, потому что поток воздуха пропорционален расходу газа Fp (t) = k * Fg (t) .
Блок управления газом Gg (s)
Вход — PI управляющий сигнал s1 (t)
Выход — Fg (t) расход газа
SE -Электропривод- Это пропорционально Установка в отличие от SE — интегральная установка в установке для смешивания красок.Он оснащен внутренней системой обратной связи по положению вала, не показанной на рисунке.
PP — расходомер меняет Fg (t) -> 0… + 10V .
Клапан — меняет положение вала–> изменение поверхности потока клапана–> изменение потока. Мы предполагаем, что Гг (с) — инерциальная единица с T = 5сек .
ПИ-регулятор давления пара
Сравнивает давление Cp (t) с уставкой x (t) .
Cp (t) Повышение давления пара вызывает Fg (t) уменьшение расхода газа–> понижение температуры воды–> Cp (t) снижение давления пара и наоборот. Давление пара Cp (t) стабилизируется в результате вышеупомянутых действий. Регулятор PI гарантирует нулевую постоянную ошибку управления и не слишком плохую динамику.
Блок управления подачей воздуха Gp (s)
Вход — PI управляющий сигнал s2 (t)
Выход — расход воздуха Fp (t)
Действие аналогично блоку управления газом Гг (ов)
ПИ-регулятор расхода воздуха
Заданное значение составляет k * Fg (t) -> обеспечивается регулировка соотношения –> Fp (t) = k * Fg (t) .Поток воздуха пропорционален потоку газа, и обеспечивается оптимальное сгорание.
Давайте протестируем
Call Desktop / PID / 19_struktury_ukladow_regulacji / 16_reg_stos_kociol.zcos
Рис. 33-45
Модель парогазового котла Xcos
Нажмите «start»
Рис. 33-46
Контроль соотношения Цель достигнута. Расход воздуха пропорционален расходу газа. Подчеркну, что регулировка передаточного числа здесь только вспомогательная.Основная цель — достижение стабильного давления пара Cp (t) независимо от паропотребляющих устройств.
Подгоните системы управления к вашему стилю управления
Система контроля не «контролирует» деятельность организации, но — при правильном использовании — это важный инструмент в наборе менеджера, позволяющий увеличить объем эффективного контроля, который он осуществляет. Контроль является центральным аспектом работы менеджера, и у него есть ряд стратегий, из которых он может выбирать.Критически важным решением для него является выбор стратегии, соответствующей его конкретной ситуации и стилю управления. Очевидно, что чем лучше сочетаются стратегия и стиль, тем лучше организация. В этой статье авторы сообщают о результатах своих недавних исследований в этой области и предоставляют полезное напоминание о том, что менеджеры так часто делают неправильно и как это исправить.
Не так давно бойскауты Америки раскрыли, что данные о членстве, поступающие с мест, были сфальсифицированы.В ответ на давление национального стремления к членству люди в организации сильно завысили количество новых бойскаутов. К своему огорчению, лидеры обнаружили то, что открыли и другие менеджеры: системы организационного контроля часто приводят к непредвиденным последствиям. Стремление к увеличению членства побудило людей увеличить количество зарегистрированных новых членов, но не побудило их увеличивать количество фактически зачисленных бойскаутов.
Случай с бойскаутами является ярким примером широко распространенной проблемы.Организации тратят большие суммы денег, времени и усилий на разработку и поддержку систем управления. Эти системы призваны повысить способность организации координировать действия своих членов и выявлять проблемы по мере их возникновения. Однако часто вместо усиления организационного контроля эти системы сокращают объем эффективного контроля, осуществляемого организацией.
Почему это происходит? Наши исследования и исследования других показывают, что проблема часто заключается в том, как менеджеры используют системы контроля. 1 Большинство систем контроля, включая системы бюджетной, управленческой информации и финансового учета, по сути, являются измерениями. Они регулярно собирают информацию о конкретных аспектах деятельности организации.
Сами системы не могут напрямую контролировать деятельность организации. Скорее, они предоставляют информацию менеджерам, которые могут осуществлять контроль. Если менеджеры хорошо используют информацию, система контроля работает. При неправильном использовании система может дать непредвиденный эффект.
Примечательно, что организации редко вкладывают много усилий в обучение менеджеров использованию систем контроля. Вместо этого большинство тратят много времени на проектирование, конструирование, доработку и улучшение технических аспектов своих систем. В результате, хотя системы организационного контроля постоянно становятся все более точными, точными и технологически сложными, два вопроса часто упускаются из виду:
1. Насколько эффективна система (и способ ее использования) в выполнении того, что она должна делать?
2.Как можно было бы лучше использовать систему?
Недавние исследования, проведенные рядом организаций, дали некоторые ответы на эти вопросы. 2 Во-первых, системы контроля влияют на то, как члены организации направляют свою энергию на работу; члены с большей вероятностью будут тратить время и силы на те области, которые охватываются системами. Во-вторых, то, как участники реагируют на системы контроля, во многом зависит от того, как менеджеры используют системы. В-третьих, разные менеджеры разрабатывают разные стратегии использования систем контроля.Наконец, у каждой стратегии есть определенные недостатки и преимущества.
Только когда менеджеры поймут (а) как эти системы влияют на поведение их подчиненных и (б) какие компромиссы возникают в каждой стратегии контроля, они могут научиться эффективно использовать системы контроля организации.
В завершение этой статьи мы обсудим, что менеджеры должны учитывать при выборе стиля управления. Мы рассмотрим различные способы, которыми системы управления влияют на управленческое поведение.Затем мы обсудим две основные стратегии использования систем управления, различные вопросы, которые следует учитывать при выборе конкретного стиля управления, и последствия окончательного решения.
Влияние на подчиненных
Когда область охвачена системой контроля, члены организации концентрируются на улучшении своих показателей в измеряемой области. Это направление энергии обусловлено тремя причинами:
1. Измерение области деятельности показывает, что высшее руководство считает эту область важной и заслуживает внимания.
2. Руководители обычно используют меры системы контроля, когда они оценивают работу подчиненных. Поскольку подчиненный обычно чувствует, что оценка руководителя влияет на его или ее вознаграждение, подчиненный имеет тенденцию вкладывать энергию в измеряемые области.
3. Член организации может легко увидеть изменения в показателях эффективности, которые являются частью системы контроля. Если его показатели улучшаются, это может быть источником личного удовлетворения.
Приложение I представляет пример того, как измерение производительности направляет подчиненную энергию.В двух разных организациях — одной северо-восточной коммунальной компании, другой — среднезападном банке — сотрудников попросили указать, в какой степени оценивались различные области деятельности. В другой момент их спросили, сколько времени и усилий они вкладывают в каждую область. Как показано на выставке, общая закономерность состоит в том, что чем больше людей воспринимают измеряемую площадь, тем больше времени и усилий они вкладывают в это.
Приложение I Измерение площади и усилия двух организаций
Действие систем управления
Похоже, что системы управления определяют, сколько энергии подчиненные вкладывают в область, но как эта энергия используется? С одной стороны, подчиненные могут быть заинтересованы в повышении уровня производительности, увеличении объемов или более качественной работе.
С другой стороны, измерение может дать результаты, которые мы видели в примере с бойскаутами. Подчиненные направляют свои усилия на «игру», чтобы «обыграть систему». Вместо того, чтобы работать хорошо, сотрудники часто ставят низкие цели, которые могут быть легко достигнуты, манипулируют мерами, чтобы добиться желаемых результатов, и фактически саботируют информационную базу системы.
Например, крупная правительственная организация потребовала, чтобы каждый человек заполнял форму, в которой отражал то, как он проводил свое время, по 20-минутным блокам.Цель состояла в том, чтобы мотивировать сотрудников управлять своим временем и генерировать достоверную информацию о том, сколько времени они уделяют различным задачам. Однако результат был совершенно другим. Сотрудники видели в системе попытку упорядочить свою жизнь и деятельность.
Таким образом, табели учета рабочего времени превратились не в полезный инструмент, а в развлекательную деятельность. В пятницу после обеда во время перерыва в работе сотрудники собирались вместе, чтобы заполнить свои табели учета рабочего времени, каждый из которых соревновался, чтобы увидеть, кто сможет составить самый нелепый отчет о деятельности.Излишне говорить, что эти записи не имели никакого отношения к фактически проделанной работе. Система не мотивировала людей повышать производительность; это побудило их играть в игры с системой.
Приложение II суммирует эффекты систем управления. Наличие мер в области влияет на поведение подчиненных, но измерение — не единственный фактор. Меры должны восприниматься сотрудниками как достаточно точные, и руководители должны умело ими пользоваться.
Приложение II Как системы управления и их использование влияют на поведение
Стратегии контроля
Менеджер должен серьезно подумать о применении мер системы контроля в какой-либо одной области.Он должен рассматривать последствия своих действий с точки зрения типов поведения, которые он мотивирует в своих подчиненных. Хотя существует целый ряд стратегий контроля, два основных подхода — внешний контроль и внутренняя мотивация — кажутся наиболее полезными для многих менеджеров. Таблица III показывает, что каждая из этих стратегий требует различного поведения со стороны менеджера, каждая из которых может иметь как желательные, так и нежелательные эффекты на поведение подчиненных.
Приложение III Две разные стратегии контроля
Внешнее управление
Эта стратегия основана на предположении, что подчиненные в конкретной ситуации мотивированы в первую очередь внешним вознаграждением и должны контролироваться их руководителями.Чтобы эффективно использовать систему управления таким образом, требуется три шага.
Во-первых, цели и стандарты, связанные с системой, должны быть относительно сложными, чтобы «растянуть» подчиненных и оставить мало места для безделья.
Во-вторых, меры площади должны быть построены так, чтобы они были «доказательствами людей», чтобы люди не могли манипулировать мерами.
В-третьих, вознаграждение должно быть напрямую и открыто связано с производительностью, как это указано в системе контроля, чтобы гарантировать, что у подчиненных есть стимул усердно трудиться.
Примером подхода внешнего контроля может быть оценка менеджера исключительно на основе результатов деятельности его центра прибыли, с относительно высокими уровнями прибыли, заложенными в бюджет, и с его вознаграждением, главным образом и непосредственно связанным с количеством долларов прибыли.
Эта стратегия внешнего управления может иметь различные эффекты. С одной стороны, подчиненные могут направить много энергии в измеряемые области и изо всех сил пытаться заставить свои меры сдвинуться с мертвой точки, поскольку они могут получить за это вознаграждение.Там, где система очень жестко структурирована, результатом будет высокая степень контроля подчиненного поведения. С другой стороны, может произойти несколько нежелательных результатов.
Во-первых, такая стратегия может побудить членов организации улучшить свои показатели эффективности, но не создать каких-либо обязательств в отношении того, чтобы они лучше выполняли свою работу. Подчиненные начнут формировать отношение к работе, при котором «хорошо» означает, что они хорошо справляются с критериями производительности, не обязательно более эффективно выполнять свою работу.В результате, если они могут повысить свою «производительность», манипулируя мерами, предоставляя ложную информацию, намеренно устанавливая низкие цели и стандарты или саботируя систему, можно ожидать, что члены организации сделают это.
Во-вторых, такая стратегия может привести к неверно направленным усилиям. Подчиненные могут вкладывать всю свою энергию в конкретное поведение, которое измеряется, забывая при этом другое поведение, которое, хотя и не измеряется, также имеет жизненно важное значение. Например, если все усилия направлены на увеличение объема продаж, количество усилий, затрачиваемых на постоянное обслуживание клиентов, может быть уменьшено.В этом случае результатом является кратковременная максимизация измеряемой площади с возможным негативным долгосрочным воздействием на неизмеряемые площади.
В-третьих, такая стратегия может уменьшить поток достоверной информации, особенно негативной. Если люди получают прямое вознаграждение за позитивное движение мер, у них может появиться мотивация утаивать информацию, которая отрицает значение этих мер, и утаивать негативную информацию от руководителей более высокого уровня, которые нуждаются в ней для принятия решений.
Наконец, такая стратегия может вызвать излишнюю осторожность, направив энергию на оправдание всех действий. Подчиненные могут быть заинтересованы в том, чтобы меры либо продолжали выглядеть хорошо (не принимая на себя никаких рисков), либо собирать файлы «на всякий случай», заполненные информацией, оправдывающей снижение измеряемой эффективности. В любом случае энергия направляется на то, чтобы справиться с системой, а не на более широкую цель — сделать организацию более эффективной.
Внутренняя мотивация
В этой стратегии руководство предполагает, что подчиненных можно мотивировать, выстраивая их приверженность целям организации и вовлекая их в выполнение необходимых задач.Они предполагают, что сотрудников будут мотивировать чувства выполненного долга, достижений, признания и самоуважения, которые возникают в результате хорошего выполнения работы. Стратегия внутренней мотивации реализуется с помощью системы управления совершенно иным образом, чем в стратегии внешнего контроля.
Во-первых, несмотря на то, что цели установлены, наиболее важной особенностью этого подхода является не сложность их достижения, а тот факт, что они устанавливаются при участии. Тем людям, которые несут ответственность за достижение целей, дается определенное влияние на характер этих целей.
Во-вторых, меры используются для совместного выявления и решения проблемы, а не для наказания или порицания. Когда представление начинает двигаться в нежелательном направлении, не время катать головы. Настало время для руководителей и подчиненных собраться вместе (а) для определения причин изменения и (б) для выработки решений возникших проблем. Таким образом, система берет на себя функцию «раннего предупреждения», выявляя проблемы, начиная процесс их разрешения до того, как эти проблемы достигнут кризисного состояния.
Наконец, хотя награды привязаны к результатам, они не привязаны к одному или двум конкретным показателям. Скорее, структура вознаграждения подчеркивает ответственность за всю работу, только часть которой может быть представлена мерами. В целом система управления становится проблемной и ориентированной на будущее. Система помогает руководителю осуществлять контроль над подчиненным поведением, направляя усилия в будущем, а не наказывая за прошлые действия каждого человека.
Эта стратегия внутренней мотивации может иметь разные эффекты.Это может вызвать высокую приверженность целям, потому что член организации участвует в их постановке и чувствует ответственность за то, чтобы они были достигнуты. Это может привести к увеличению энергии, направляемой на выполнение задачи. По мере того, как производительность повышается, и когда человек отслеживает свой прогресс с помощью мер системы контроля, стратегия может также повысить удовлетворенность сотрудника от качественного выполнения своей работы.
Таким образом, открытый характер системы контроля и ее общая, а не конкретная подотчетность означают, что у подчиненных мало стимулов играть в игры или вести себя дисфункционально.Что еще более важно, он поощряет и вознаграждает поток достоверной информации, особенно негативной.
В то же время такая стратегия может иметь некоторые нежелательные эффекты. Сравнительно свободный характер этого подхода означает, что у менеджера будет меньше контроля над поведением своих подчиненных. Поскольку менеджер отказывается от полного контроля над конкретными целями, подчиненные могут ставить менее амбициозные цели.
Кроме того, поскольку информация, предоставляемая системой управления, предназначена для решения проблем, а не для оценки, становится трудно использовать ее в качестве основы для вознаграждения.Таким образом, менеджер должен пожертвовать частью ценности, присущей подходу внешнего контроля, чтобы создать внутреннюю мотивацию со стороны подчиненных.
Наконец, некоторые люди могут не реагировать на процесс участия из-за различий в стиле работы или личности. Таким образом, эти люди не будут заинтересованы в успешной работе в рамках данной стратегии.
Стратегии выбора
Ни одна из двух только что рассмотренных стратегий не обязательно является «правильной» стратегией для использования во всех случаях.Поскольку у каждого из них есть определенные недостатки и преимущества, менеджер должен осознанно и тщательно выбирать подход, соответствующий его конкретной ситуации. Делая этот выбор, ему необходимо учитывать следующие четыре вопроса:
1. Согласованность между выбором стратегии и стилем управления.
При выборе стратегии контроля менеджеру, возможно, придется изменить свой стиль или стратегию, чтобы его общий подход к управлению был последовательным. Например, если руководитель обычно принимает все важные решения без привлечения подчиненных, было бы ошибкой использовать подход внутренней мотивации.Подчиненные привыкли следовать за менеджером. Они могут быть неспособны самостоятельно ставить реалистичные цели; или, что еще хуже, они могут использовать свое влияние для постановки простых целей, которых, как они знают, они могут достичь. Подход внутренней мотивации к организационному контролю, вероятно, будет эффективным только в контексте обычно основанных на широком участии отношений между менеджером и подчиненным.
2. Организационный климат, структура и система вознаграждения.
Стратегия контроля, чтобы быть наиболее эффективной, должна согласовываться с другими факторами в организации, которые определяют поведение сотрудников.Например, жесткая система контроля в организации, которая обычно предоставляет сотрудникам большую свободу действий и свободу действий, вскоре столкнется с проблемами.
3. Надежность показателей эффективности работы.
В некоторых случаях показатели системы контроля точно отражают производительность труда. В других случаях меры неадекватно показывают, насколько хорошо выполняется работа. Когда система контроля является ненадежным показателем эффективности, трудно реализовать стратегию жесткого внешнего контроля, поскольку использование неточных или ненадежных мер в качестве основы для оценки и вознаграждения может иметь катастрофические последствия.В таких условиях требуется более свободная и более внутренне ориентированная стратегия организационного контроля.
4. Индивидуальные различия между подчиненными.
Поскольку люди мотивированы разными потребностями, они могут по-разному реагировать на одну и ту же организационную структуру. Выбор стратегии контроля предполагает, что менеджер кое-что знает о характере людей, которые на него работают. Лица, приверженные самой работе (например, во многих профессиональных профессиях), вероятно, будут менее восприимчивы к стратегии внешнего контроля, чем те, чьей основной мотивацией является финансовое вознаграждение или продвижение по службе.
Менеджер также должен учитывать, насколько сотрудники хотят участвовать в принятии решений. Некоторые люди могут хорошо отреагировать на возможность участия, в то время как другие могут не захотеть принимать более активное участие или брать на себя ответственность. Таким образом, типы людей, которые работают на менеджера, должны быть фактором, влияющим на его выбор стратегии управления.
Осознанный выбор
На первый взгляд может показаться, что у менеджера слишком много факторов, которыми нужно манипулировать, чтобы сделать эффективный выбор.Один из способов решения этой проблемы состоит в том, чтобы менеджер последовательно выкладывал ключевые решения и точки выбора.
Во-первых, менеджер должен задать себе ряд вопросов (см. Приложение IV). Какой стиль управления он обычно использует? В какой он организации? Насколько точны и надежны его важные показатели эффективности? Наконец, насколько его подчиненные хотят участвовать в принятии решений?
Приложение IV. Вопросы, которые менеджер должен задать себе при выборе стратегии контроля
Во-вторых, менеджер должен систематически оценивать свои ответы, чтобы определить наиболее подходящую стратегию.Один из способов сделать это — использовать подход на основе дерева решений (см. Приложение V). Как показано на выставке, разные комбинации ответов на ключевые вопросы приводят менеджера к разным рекомендованным стратегиям с разными проблемами, касающимися их реализации.
Приложение V Дерево решений для выбора стратегии управления
В дополнение к шагам принятия решений, описанным в Приложении V, менеджеру также необходимо рассмотреть компромиссы между различными стратегиями, которые могут применяться в его конкретной ситуации.Очевидно, он должен взвесить желаемые или нежелательные эффекты (как указано в Приложении III), которые система контроля может оказать на его конкретную группу подчиненных.
Например, если возможности для игры немногочисленны, а затраты компании, ведущей игру, низки, стратегия внешнего управления может быть более осуществимой. Однако в большинстве организаций потенциальные затраты на проведение игр высоки. Таким образом, менеджеры должны серьезно рассмотреть стратегию внутренней мотивации, особенно если основной процесс принятия решений показывает, что подчиненное участие возможно.
Система контроля и способ ее использования представляют собой потенциально мощный инструмент для воздействия на поведение людей в организациях. Точно так же, как менеджеру необходимо делать осторожный и осознанный выбор среди стратегий контроля, организация должна осознавать альтернативные подходы к разработке и использованию систем контроля. Осознание потенциального воздействия систем контроля и огромной важности процесса контроля — в отличие от технологии контроля — имеет ключевое значение для повышения продуктивности и эффективности организации и ее сотрудников.
1. Исследования, такие как Криса Аргириса «Влияние бюджетов на людей » (Итака, Нью-Йорк: Корнельский университет, 1952 г.) и «Использование и неправильное использование средств контроля эффективности» Фрэнка Дж. Ясинского, HBR июль – август 1956 г., с. 105, приведите конкретные примеры проблем, которые могут возникнуть из-за плохого использования систем обратной связи.
2. Энтони Г. Хопвуда «Система бухгалтерского учета и управленческое поведение » (Лондон: Haymarket Publishing, Ltd., 1974) и Герт Х. Хофстеде «Игра в бюджетный контроль » (Ассен, Нидерланды: Van Gorcum, 1967) рассматривают систематически о способах использования бухгалтерской информации и влиянии, которое это использование может иметь.
Версия этой статьи появилась в выпуске Harvard Business Review за январь 1976 года.Введение в активное управление | SpringerLink
Часть Международный центр механических наук CISM серия книг (CISM, том 345)Abstract
По сравнению с пассивным рассеянием энергии, исследования и разработки технологии активного структурного управления имеют более недавнее происхождение. В структурной инженерии активное структурное управление — это область исследований, в которой движение конструкции контролируется или модифицируется посредством действия системы управления через некоторый внешний источник энергии.По сравнению с пассивными системами можно указать ряд преимуществ, связанных с активными системами; Среди них (а) повышенной эффективности в управлении движением . Степень эффективности, по большому счету, ограничивается только возможностями системы контроля; (b) относительная нечувствительность к условиям площадки и колебаниям грунта; (c) применимость к ситуациям смягчения многих опасностей. Активная система может использоваться, например, для управления движением как от сильного ветра, так и от землетрясений; и (d) селективность целей контроля .Например, можно сделать упор на комфорт человека по сравнению с другими аспектами структурного движения.
В последние годы большое внимание было уделено активным исследованиям в области структурного контроля. Сейчас он находится на стадии проектирования, изготовления и монтажа реальных систем в полномасштабные конструкции. Ряд обзорных статей (Miller et al., 1988; Kobori, 1988; Masri, 1988; Soong, 1988; Yang and Soong, 1988; Reinhorn, Manolis, 1989; Soong et al., 1991) и книга (Soong, 1990) предоставили читателю информацию и оценку последних достижений в этой развивающейся области.
Это предварительный просмотр содержимого подписки,
войдите в, чтобы проверить доступ.
Предварительный просмотр
Невозможно отобразить предварительный просмотр. Скачать превью PDF.
Ссылки
Кобори, Т. (1988), «Современный отчет: Активный контроль сейсмического реагирования»,
Proc. Девятая всемирная конференция по землетрясениям Engrg., Токио / Киото, Япония, Vol. VIII, 435–446 ;.
Google ScholarMasri, S.F. (1988), «Сейсмический контроль структурных систем: закрытие»,
Proc.Девятая всемирная конференция по землетрясениям Engrg., Токио / Киото, Япония, Vol. VIII, 497–502.
Google ScholarМиллер Р.К., Масри С.Ф., Дехганьяр Т.Дж. и Caughey, T.K. (1988), «Активный контроль вибрации крупных строительных конструкций»,
AS CE J. Engrg. Мех. Div. Vol. 114, 1542–1570.
CrossRefGoogle ScholarРейнхорн, А. и Манолис, Г.Д. (1989), «Последние достижения в области структурного контроля»,
Shock and Vibration Digest, Vol.21, 3–8.
CrossRefGoogle ScholarСунг, Т.Т. (1988), «Обзор современного состояния: активный структурный контроль в гражданском строительстве»,
Engineering Structures, Vol. 10, 74–84.
CrossRefGoogle ScholarSoong, T.T. (1990),
Active Structural Control: Theory and Practice, Longman, London, and Wiley, New York.
Google ScholarSoong, T.T., Reinhorn, A.M. и другие. (1991), «Полномасштабная реализация активного управления — Часть I: Проектирование и моделирование»,
ASCE J.Struct. Engrg., Т. 117 (11), 3516–3636.
CrossRefGoogle ScholarSoong, T.T., Masri, S.F. и Housner, G.W. (1991) «Обзор активного структурного контроля при сейсмических нагрузках»,
Earthquake Spectra, Vol. 7 (3), 483–505.
CrossRefGoogle ScholarYang J.N. и Сунг, Т.Т. (1988), «Последние достижения в активном управлении инженерными сооружениями»,
J. Prob Eng. Мех., Т. 3, 179–188.
CrossRefGoogle Scholar
Информация об авторских правах
© Springer-Verlag Wien 1994
Авторы и аффилированные лица
- 1. Государственный университет Нью-Йорка в Буффало, Буффало, США
Создание систем организационного контроля — освоение стратегического управления в Канаде.
Цели обучения
- Разберитесь в трех типах систем управления.
- Знайте сильные и слабые стороны обычных управленческих увлечений.
Помимо создания соответствующей организационной структуры, эффективное выполнение стратегии зависит от умелого использования систем организационного контроля. Руководители создают стратегии, чтобы попытаться достичь видения, миссии и целей своей организации. Организационные системы контроля позволяют руководителям отслеживать, насколько хорошо организация работает, выявлять проблемные области и затем принимать меры по их устранению. Руководителям доступны три основных типа систем контроля: (1) управление выходом, (2) контроль поведения и (3) контроль клана.Разные организации делают упор на разные типы контроля, но большинство организаций используют сочетание всех трех типов.
Управление выводом
Контроль результатов ориентирован на измеримые результаты внутри организации. Примеры из делового мира включают количество посещений веб-сайта, получаемых в день, количество микроволновых печей, которые производятся на конвейере в неделю, и количество автомобилей, которые продавец автомобилей продает в месяц (рис. 9.16 «Контроль выхода»).В каждом из этих случаев руководители должны решить, какой уровень производительности является приемлемым, довести ожидания до соответствующих сотрудников, отслеживать, соответствует ли производительность ожиданиям, а затем внести необходимые изменения. По иронии судьбы, группа работников почты в Пенсаколе, штат Флорида, однажды была разочарована, узнав, что их зарплата была потеряна почтовой службой США! Исправление было простым: они начали получать зарплату через прямой перевод, а не по почте.
Во многих случаях ставки намного выше. В начале 2011 года Delta Air Lines была вынуждена столкнуться с некоторыми фактами в рамках использования контроля над выпуском продукции. Данные, собранные федеральным правительством, показали, что только 77,4% рейсов Delta прибыли вовремя в течение 2010 года. Это привело к тому, что Delta заняла последнее место среди крупнейших авиакомпаний США и пятнадцатое из восемнадцати перевозчиков (Yamanouchi, 2011). В ответ «Дельта» предприняла важные корректирующие действия. В частности, авиакомпания расширила свои возможности по обслуживанию самолетов и провела дополнительные тренинги по обслуживанию клиентов для своих сотрудников.Поскольку некоторые задержки неизбежны, Delta также объявила о планах круглосуточно создать учетную запись в Twitter под названием Delta Assist, чтобы помогать пассажирам, чьи рейсы задерживаются. Эти и другие изменения окупились. Во втором квартале 2011 года Delta получила прибыль в размере 198 миллионов долларов, несмотря на то, что ей пришлось покрыть расходы на топливо, увеличившиеся на 1 миллиард долларов из-за роста цен (Yamanouchi, 2011).
Рисунок 9.16: Элементы управления выходомУправление выходом также играет большую роль в университетском опыте.Например, баллы за тесты и средний балл являются хорошими примерами показателей результатов. Если вы плохо справитесь с тестом, вы можете предпринять корректирующие действия, усердно изучая или подготовившись в группе к следующему тесту. В колледжах и университетах студенты могут пройти академический испытательный срок, если их оценки или средний балл упадут ниже определенного уровня. Если их успеваемость не улучшится, они могут быть отстранены от основной и даже отстраненной от дальнейшего обучения. С другой стороны, показатели производительности также могут вызывать вознаграждение.Очень высокий средний балл может привести к включению в список декана и выпуску с отличием.
Рисунок 9.17: Музей антропологии UBCАртур Эриксон, известный канадский архитектор, окончил Университет Британской Колумбии, ему было поручено спроектировать здесь Музей антропологии, который открылся в 1976 году. Он был вдохновлен стоечно-лучевой архитектурой коренных народов Северного Северо-Западного побережья.
Контроль поведения
В то время как контроль вывода фокусируется на результатах, контроль поведения фокусируется на контроле действий, которые в конечном итоге приводят к результатам.В частности, используются различные правила и процедуры, чтобы стандартизировать или диктовать поведение (рисунок 9.18 «Поведенческий контроль»). Например, в большинстве штатов в ванных комнатах ресторанов вывешивают знаки, напоминающие сотрудникам, что они должны вымыть руки перед возвращением на работу. Дресс-коды, которые соблюдаются во многих организациях, — еще один пример контроля над поведением. Чтобы предотвратить кражу сотрудников, многие фирмы имеют правило, согласно которому чеки должны подписывать два человека. Некоторые работодатели могут предпочесть некурящих сотрудников, поскольку перерывы на сигареты могут занимать до 40 минут рабочего дня, плюс более высокие прогулы и связанные с этим расходы на здоровье курильщиков.
Рисунок 9.18: Поведенческий контрольКонтроль результатов также играет важную роль в университетском опыте. Наглядный (хотя, возможно, неприятный) пример — наказание учеников за то, что они не посещают занятия. Профессора оценивают посещаемость, чтобы диктовать поведение студентов; в частности, чтобы заставить учеников посещать занятия. Между тем, если бы вы предложили создать правило, заставляющее профессоров обновлять свои лекции не реже одного раза в пять лет, мы не будем с вами не согласны.
За пределами классной комнаты контроль за поведением является важным фактором в спортивных программах университетов и колледжей. Канадская студенческая спортивная ассоциация (CCAA) управляет легкой атлетикой в колледжах, используя набор правил, политик и процедур. Ожидается, что члены CCAA, все игроки и тренеры будут следовать стандартным руководящим принципам и принципам Кодекса этики CCAA, а их несоблюдение приведет к дисциплинарным взысканиям. Некоторая степень контроля над поведением необходима практически во всех организациях.
Создание эффективной структуры вознаграждения является ключом к эффективному управлению поведением, потому что люди склонны сосредотачивать свои усилия на поведении, которое поощряется. Проблемы могут возникнуть, когда людей вознаграждают за поведение, которое на первый взгляд кажется положительным, но при некоторых обстоятельствах может подорвать цели организации. Например, официанты в ресторанах очень заинтересованы в том, чтобы быстро обслуживать свои столы, потому что это может увеличить их чаевые. Но если сервер уделяет все свое внимание обеспечению быстрого обслуживания, могут пострадать другие задачи, жизненно важные для работы ресторана, такие как эффективное общение с менеджерами, обслуживающим персоналом, поварами и другими серверами.Менеджеры должны знать о таких компромиссах и стремиться согласовывать вознаграждение с поведением. Например, обслуживающий персонал, который постоянно ведет себя как командный игрок, может быть назначен на наиболее желательные и прибыльные смены, такие как ночи и выходные.
Рисунок 9.19: Хотя некоторые элементы управления поведением предназначены для сотрудников, а не для клиентов, их соблюдение выгодно для всех.Контроль клана
Вместо измерения результатов (как при контроле результатов) или диктовки поведения (как при поведенческом контроле), контроль клана является неформальным типом контроля.В частности, клановый контроль опирается на общие традиции, ожидания, ценности и нормы, которые побуждают людей работать на благо своей организации (рис. 9.20 «Контроль кланов»). Клановый контроль часто используется в условиях, когда творческий потенциал жизненно важен, например, во многих высокотехнологичных предприятиях. В этих компаниях объем производства трудно диктовать, и многие правила неуместны. Креативность ученого-исследователя, вероятно, будет задушена, например, если ему или ей дадут квоту патентов, которая должна выполняться каждый год (контроль результатов), или если будет введен строгий дресс-код (контроль поведения).
Рисунок 9.20: Управление кланомGoogle — это компания, которая для достижения успеха полагается на клановый контроль. Сотрудникам разрешается тратить 20 процентов своей рабочей недели на собственные инновационные проекты. Компания предлагает своим сотрудникам «список рассылки идей», чтобы они могли подавать новые идеи и комментировать идеи других. Руководители Google обычно два-три раза в неделю предоставляют сотрудникам возможность навещать их, чтобы представить свои идеи. Эти неформальные встречи привели к появлению ряда нововведений, включая персонализированные домашние страницы и Новости Google, которые в противном случае могли бы никогда не быть приняты.
Рисунок 9.21: В рамках усилий по созданию команды в Google новые сотрудники известны как Noogles и получают шляпу с пропеллером.Некоторые руководители стремятся к контролю кланов, чтобы улучшить работу организаций, испытывающих трудности. В 2014 году генеральный директор Rogers Communications Гай Лоуренс официально обнародовал свой план по оживлению роста крупнейшей коммуникационной компании страны. Стратегия, получившая название «Роджерс 3.0», была направлена на повышение качества обслуживания клиентов и более эффективное использование активов компании, включая все, от журналов до Toronto Blue Jays.Лоуренс объяснил проблемы, с которыми, по его мнению, борется компания, и объяснил, как их план будет решать их. Реорганизация направлена на улучшение обслуживания клиентов путем объединения всех элементов клиентского опыта — 10 400 сотрудников — в единое подразделение, подчиняющееся ему. В планах улучшить обслуживание клиентов для бизнеса и корпоративных клиентов, Роджерс отделил потребителей от корпоративных, полагая, что в корпоративной сфере есть история роста. Наконец, Лоуренс сказал, что наличие у Роджерса спортивных, вещательных и издательских услуг будет отличать компанию от конкурентов в сфере телекоммуникаций, и прокомментировал: «Я считаю, что контент — самая важная часть нашего микса» (Castaldo, 2014).
Контроль кланов также важен во многих канадских городах. В Ванкувере есть паровые часы и Wreck Beach; В Торонто есть Си-Эн Тауэр и Блю Джейс; В Эдмонтоне есть торговые центры Oilers и West Edmonton. Эти достопримечательности являются предметом гордости жителей и желанными местами для посещения туристами; они помогают людям почувствовать себя принадлежащими к чему-то особенному.
Стоит отметить, что системы контроля, однажды встроенные в организацию, очень трудно изменить. Системы контроля появились внутри организации не случайно, а в ответ на потребность фирмы контролировать работу сотрудников, чтобы стимулировать высокую производительность.Изменение показателей результатов — это приглашение к игре с данными, когда сотрудники находят инновационные способы убедиться, что данные показывают, что они работают на ожидаемом уровне, в то время как поведение и клановую культуру, как известно, трудно изменить, и часто требуется десятилетие или больше, чтобы по-настоящему измениться. Новые руководители часто настраивают системы управления, чтобы повысить производительность. Однако время, необходимое для фактического внедрения таких изменений, часто превышает срок пребывания в должности руководителя в фирме — отсюда и фраза , последняя (управленческая) причуда .
Причуды менеджмента: вышли из-под контроля?
Не гонитесь за последними причудами менеджмента. Ситуация диктует, какой подход лучше всего выполняет миссию команды.
— Колин Пауэлл, бывший государственный секретарь США
Появление и исчезновение причуд, кажется, является предсказуемым аспектом современного общества. Причуда возникает, когда какой-то элемент популярной культуры с энтузиазмом принимается группой людей.Например, за последние несколько десятилетий модные прихоти включали костюмы для отдыха (1970-е), куртки «только для членов» (1980-е), обувь Doc Martens (1990-е) и Crocs (2000-е). По иронии судьбы причина возникновения увлечения также обычно является причиной его упадка. Уникальность (или даже возмутительность) моды, игрушки или прически создает «ажиотаж» и известность, но также гарантирует, что их привлекательность носит временный характер (Ketchen & Short, 2011).
Рисунок 9.22: Управление причудами управленияПричуды также кажутся предсказуемым аспектом делового мира (Рисунок 9.22 «Управление причудами менеджмента»). Как и в случае с культурными причудами, многие провокационные бизнес-идеи проходят жизненный цикл, вызывая ажиотаж, привлекая группу энтузиастов и уступая место следующей моде. Полки книжных магазинов предлагают бесконечный запас популярных книг по менеджменту, содержание которых варьируется от интригующего до абсурдного. В рамках темы лидерства, например, различные книги обещают раскрыть «секреты лидерства» множества известных личностей, таких как Иисус Христос, Хиллари Клинтон, Аттила Гунн и Санта-Клаус.
Помимо поразительного сходства между культурными и деловыми увлечениями, существуют также важные различия. Большинство культурных причуд безвредны и редко создают долгосрочные проблемы для тех, кто их поддерживает. Напротив, стремление к деловой моде может привести к тому, что руководители примут неверные решения. Как следует из цитаты Колина Пауэлла, надежда на разумные методы ведения бизнеса с гораздо большей вероятностью поможет руководству реализовать стратегию своей организации, чем общие мудрые слова из Old St.Ник.
Многие причуды менеджмента были тесно связаны с системами контроля организации. Например, одной из самых известных причуд была попытка использовать управление выводом для повышения производительности. Управление по целям (MBO) — это процесс, в котором менеджеры и сотрудники работают вместе для достижения целей. Эти цели определяют поведение сотрудников и служат ориентирами для оценки их работы. После презентации MBO в книге Питера Друкера «« Практика управления »1954 года, многие руководители восприняли этот процесс как панацею от организационных проблем и проблем, как будто предыдущее руководство не заботилось о своих целях!
Однако, как и многие другие причуды, идея MBO вышла из-под контроля.Компании, которые пытались поставить цель для каждого аспекта деятельности сотрудников, в конечном итоге обнаружили, что это нереально. Создание явных целей может вступать в противоречие с действиями, предполагающими неявные знания об организации. Нематериальные понятия, такие как «обеспечение безупречного обслуживания клиентов», «правильное отношение к людям» и «прилагать все усилия», являются ключевыми для успеха многих организаций, но эти понятия сложно, если не невозможно, измерить количественно. Таким образом, в некоторых случаях побудить сотрудников принять определенные ценности и другие аспекты кланового контроля более эффективно, чем MBO.
Круги качества были второй модой, основанной на понятии контроля над поведением. Круги качества появились в Японии в 1960-х годах и впервые были введены в Соединенных Штатах в 1972 году. Круг качества — это формальная группа сотрудников, которая регулярно встречается для поиска решений организационных проблем. Как следует из названия «круг качества», определение поведения, которое могло бы улучшить качество продуктов, и процессов управления операциями, которые создают продукты, было формальной обязанностью многих кругов качества.
В то время как в круговороте качества качество изображалось как ключевой фактор производительности, быстро стало очевидно, что эта точка зрения была слишком узкой. Напротив, качество — это лишь один из четырех важнейших аспектов производственного процесса; скорость, стоимость и гибкость также важны. Максимизация любого из этих четырех параметров часто приводит к получению продукта, который просто не может удовлетворить потребности клиентов. Например, многие продукты безупречного качества создавались бы слишком медленно и слишком дорого, чтобы эффективно конкурировать на рынке.Таким образом, неизбежны компромиссы между качеством, скоростью, стоимостью и гибкостью.
Улучшение кланового контроля было целью обучающих групп (или Т-групп) , которые использовались во многих организациях в 1960-х годах. Это увлечение включало в себя собрания примерно от восьми до пятнадцати человек, которые открыто обсуждали свои эмоции, чувства, убеждения и предубеждения по поводу рабочих вопросов. В отличие от жесткой природы MBO, T-группа включала в себя непринужденные беседы, проводимые фасилитатором.Считалось, что эти обсуждения приведут людей к большему пониманию самих себя и других. Ожидаемыми результатами были более образованные сотрудники и более высокий дух командной работы.
Исследования в области социальной психологии показали, что группы зачастую намного жестче, чем отдельные лица. К сожалению, это означало, что откровенный характер дискуссий в Т-группах мог легко перерасти в обвинения и унижение. В конце концов, увлечение T-group уступило место признанию того, что создавать потенциально болезненные ситуации нет места внутри организации.Однако намеки на более мягкую сторону Т-групп все еще можно наблюдать в современных модных тимбилдингах. Возможно, самой известной из них является «игра доверия», которая утверждает, что укрепляет доверие между сотрудниками, заставляя людей отступать и полагаться на своих коллег, чтобы поймать их.
Улучшение кланового контроля послужило основой для увлечения организационной культурой , которая была в моде в 1980-х. Эта причуда подпитывалась бестселлером 1982 года под названием В поисках совершенства: уроки самых успешных компаний Америки .Авторы Том Питерс и Роберт Уотерман изучили компании, которые они считали выдающимися исполнителями, и выявили восемь общих черт, присущих компаниям. Большинство общих черт, включая «близость к клиенту» и «продуктивность через людей», возникли из мощных корпоративных культур. Книга быстро стала международной сенсацией; за первые четыре года после публикации было продано более трех миллионов копий.
Вскоре стало ясно, что значение организационной культуры преувеличивается.Вскоре как популярная пресса, так и научные исследования показали, что многие из «превосходных» компаний Питерса и Уотермана быстро пережили тяжелые времена. Основные темы, такие как обслуживание клиентов и оценка компании, весьма полезны, но эти элементы кланового контроля часто не могут заменить ответственность сотрудников за свою работу.
Рис. 9.23. Активные игры в кикбол могут помочь сформировать культуру организации, но такие мероприятия не должны заменять ответственность сотрудников за достижение результатов.История причуд позволяет нам делать определенные прогнозы относительно горячих идей сегодняшнего дня, таких как расширение прав и возможностей, «от хорошего к великому» и вирусный маркетинг. Руководители, извлекающие из этих причуд и действующие на их основе, скорее всего, получат удовольствие от повышения производительности. Расширение прав и возможностей, например, основывается на важных результатах исследований, касающихся сотрудников — многие сотрудники могут предложить своим компаниям важные идеи, и эти сотрудники становятся более вовлеченными в свою работу, когда руководители серьезно относятся к их идеям.Однако слишком полагаться на прихоть редко удается.
Точно так же, как руководители в 1980-х не могли рассматривать В поисках совершенства как рецепт успеха, сегодняшние руководители не должны относиться к бестселлеру Джеймса Коллинза 2001 года « От хорошего к великому: почему одни компании делают рывок… а другие — нет». t как подробный план управления их компаниями. В целом руководители должны понимать, что управленческие причуды обычно содержат основную истину, которая может помочь организациям совершенствоваться, но что в большинстве организаций необходим баланс результатов, поведения и кланового контроля.Как заметил легендарный писатель Джек Керуак: «Великие дела не достигаются теми, кто уступает тенденциям, модам и общественному мнению».
Ключевые вынос
- Организационные системы контроля являются жизненно важным аспектом реализации стратегии, потому что они отслеживают производительность и выявляют корректировки, которые необходимо внести. Контроль выхода предполагает измеримые результаты. Поведенческий контроль включает в себя регулирующие действия, а не результаты. Клановый контроль опирается на набор общих ценностей, ожиданий, традиций и норм.Со временем появился ряд причуд, направленных на улучшение процессов организационного контроля. Хотя изначально эти причуды, как правило, рассматриваются как панацея, руководители в конечном итоге понимают, что для создания эффективных организационных средств контроля необходим ряд рациональных методов ведения бизнеса.
Упражнения
- Какой тип контроля, по вашему мнению, работает с вами наиболее эффективно и почему?
- Какие общие методы ведения бизнеса, по вашему мнению, будут считаться модными в будущем?
- Как вы могли бы интегрировать каждый тип управления в классную комнату колледжа, чтобы учащиеся учились максимально эффективно?
Список литературы
Адамс, С.(2013, 5 июня). Каждый курильщик обходится работодателю в 6000 долларов в год. Действительно? Форбс . Получено с: http://www.forbes.com/sites/susanadams/2013/06/05/every-smoker-costs-an-employer-6000-a-year-really/
Дж. Кастальдо (23 мая 2014 г.). Генеральный директор Rogers Гай Лоуренс говорит, что масштабная реструктуризация направлена на улучшение обслуживания клиентов. Канадский бизнес. Получено с http://www.canadianbusiness.com/companies-and-industries/guy-laurence-rogers-3/
Кетчен, Д.Дж. И Шорт, Дж. С. (2011). Отделение причуд от фактов: уроки «хорошего, модного и уродливого». Business Horizons , 54 , 17–22.
UBC по делам выпускников. (2009, осень). От объятий до дедовщины: история ориентации студентов . Получено с http://www.alumni.ubc.ca/trekmagazine/25-fall2009/hazing.php
.Организация Википедия. (2014). Музей антропологии в UBC . Получено с http://en.wikipedia.org/wiki/Museum_of_Anthropology_at_UBC
.систем управления в бизнес-организации | Small Business
Когда вы являетесь индивидуальным предпринимателем, вы можете создавать и использовать свои собственные системы для работы с деньгами, ведения учета и производства продуктов.По мере вашего роста, добавления сотрудников и создания отделов важно устанавливать объективные принципы и процессы для поддержания стабильности, максимальной производительности и снижения угрозы мошенничества. Обзор некоторых стандартных средств управления бизнесом, которые компании используют для управления своими организациями, поможет вам определить, что добавить к вашему бизнесу.
Финансовый контроль
Одна из наиболее распространенных систем контроля в бизнес-организации охватывает способы обращения с деньгами. Небольшие предприятия часто требуют как минимум двух подписей на чеках.Некоторые требуют от сотрудников заранее подавать заявки на командировочные расходы, утверждать их начальником, а затем предоставлять подробные отчеты о расходах после собрания или конференции. Компания может потребовать квитанции для любых расходов, превышающих определенную сумму в долларах, или потребовать квитанции для возмещения, а не выписки по кредитной карте. Во избежание ошибок бухгалтеры ежемесячно проводят сверку, проверяя соответствие бухгалтерской книги компании и банковской выписки. Проводите регулярные и неожиданные внутренние и внешние финансовые аудиты для выявления ошибок или мошенничества.
Управление запасами
Наличие слишком большого или слишком малого количества запасов может затруднить ваш денежный поток, снизить продажи и уменьшить вашу прибыль. Если у вас нет системы управления запасами, поговорите со своими сотрудниками по продажам, производству и финансам, чтобы определить, как поддерживать наиболее эффективные уровни запасов. Это может включать в себя прогнозирование спроса, запуск производства, когда запасы опускаются ниже определенного уровня, или работу с клиентами по сокращению крупных будущих заказов путем их более частой доставки небольшими партиями.
Закупки
Чтобы получить максимальную отдачу от того, что вы покупаете, создайте инструкции по закупкам, которые требуют от сотрудников изучения нескольких вариантов перед покупкой. Вы можете назначить одного человека, отвечающего за закупки, который рассматривает запросы сотрудников и проводит дополнительные исследования перед утверждением покупки. Если вы пользуетесь услугами подрядчиков, разработайте ежегодный запрос предложений, чтобы убедиться, что ваши продавцы и поставщики работают на ваш бизнес каждый год.
Руководство для сотрудников
Чтобы защитить себя от нарушений закона на рабочем месте и снизить угрозу судебных исков со стороны сотрудников, создайте подробное руководство по политикам и процедурам компании.В руководстве для сотрудников должны быть установлены меры контроля за одеждой, посещаемостью, личным поведением, безопасностью на рабочем месте, политикой рассмотрения жалоб, дисциплиной, ежегодными проверками, преследованием, дискриминацией, возмещением расходов и использованием оборудования компании в личных целях. Посетите веб-сайт департамента труда вашего штата, чтобы узнать о ваших обязанностях как работодателя. Изучите федеральные правила, посетив веб-сайт Министерства труда, или встретитесь со специалистом по трудоустройству или кадрам, который поможет вам разработать политику и следовать необходимым государственным и федеральным правилам.
Ссылки
Биография писателя
Сэм Эш-Эдмундс пишет и читает лекции на протяжении десятилетий. Он работал в корпоративной и некоммерческой сферах в качестве руководителя C-Suite, входя в несколько советов директоров некоммерческих организаций. Он — писатель и лектор по спортивным наукам, который много путешествовал по миру.